Podręcznik
1. Programowanie dynamiczne
1.1. Formalizacja elementów PD
Programowanie dynamiczne wymaga wyróżnienia etapów (ang. stages), w których są podejmowane decyzje (akcje, ang. actions) specyficzne dla konkretnych stanów (ang. states) procesu decyzyjnego. Przejścia (ang. transitions) z jednego stanu do drugiego, wiążą się z kosztem i są efektem podjętej decyzji, lub losowego zdarzenia (deterministyczne vs. stochastyczne PD).
Własność Markowa. Stan (czyli wartość) zmiennych decyzyjnych \(x\) w danym etapie \(t\) zależy tylko od stanu oraz akcji \(u\) z poprzedniego etapu \(t-1\), zgodnie z funkcją przejścia \(g(\cdot)\):
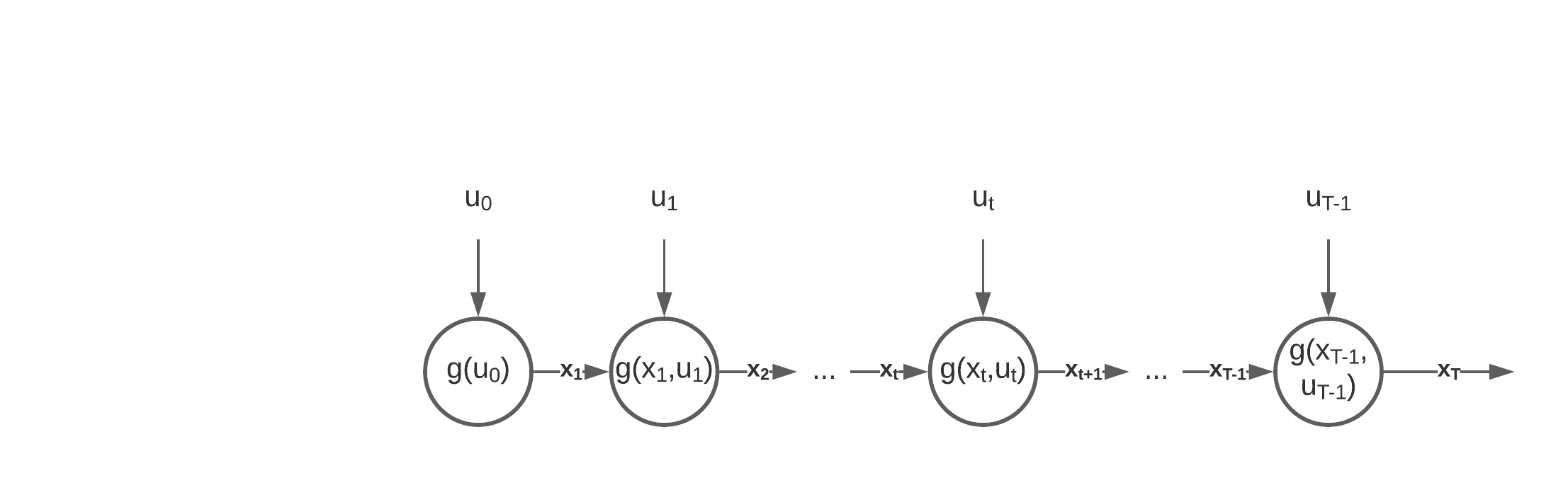
Zauważmy, że w końcowym etapie T nie podejmujemy decyzji.
\( x_{t+1} = g(x_t, u_t),\;\; \forall t = 1\ldots T-1 \)
Proces decyzyjny spełniający tę własność jest procesem Markowa, który można przedstawić tak jak na poniższym schemacie.Zauważmy, że w końcowym etapie T nie podejmujemy decyzji.
Własność Markowa musi być spełniona aby można było zastosować PD. Drugim warunkiem jest możliwość dekompozycji funkcji celu na stany i etapy.
Separowalność funkcji celu. Funkcja celu jest separowalna jeśli można ją zdekomponować na mniejsze funkcje, operujące na zmiennych i parametrach odnoszących się do konkretnych etapów:
\( f(u_0, x_1, u_1, x_2\ldots, u_{T-1}, x_T) = H(f_1(x_1,u_0), f_{t+1}(x_{t+1},u_t),\ldots,f_T(x_T,u_{T-1})) \)
Najczesciej oznacza to addytywnosc komponentów f. celu. Inna mozliwosc to np. mnożenie, etc..
\( f(u_0, x_1, u_1, x_2\ldots, u_{T-1}, x_T) = H(f_1(x_1,u_0), f_{t+1}(x_{t+1},u_t),\ldots,f_T(x_T,u_{T-1})) \)
Najczesciej oznacza to addytywnosc komponentów f. celu. Inna mozliwosc to np. mnożenie, etc..
Podsumowując, dla problemów spełniających powyższe własności definiujemy następujące elementy PD:
- Etapy,
- Stany – wartości, które mogą przyjmować zmienne decyzyjne w każdym z etapów,
- Przejścia z jednego stanu do kolejnego, które są efektem podjętej decyzji,
- Funkcja Bellmana (value function), która określa w konkretnym etapie najlepszą wartość funkcji celu, osiągalną z konkretnego stanu.
Funkcja Bellmana. Dla addytywnie separowalnej funkcji celu:
\( \min_{x,u} f(u_0, x_1, u_1, x_2\ldots, u_{T-1}, x_T) = \min_{u_0}f_1(x_1,u_0)+ \min_{u_t} f_{t+1}(x_{t+1},u_t),\ldots, \min_{u_{T-1}} f_T(x_T,u_{T-1}) \)
Optymalne rozwiązanie wyznaczymy szukając decyzji, która oprócz lokalnej funkcji celu uwzględnia wartość w kolejnym etapie.
\( \min_{x,u} f(u_0, x_1, u_1, x_2\ldots, u_{T-1}, x_T) = \min_{u_0}f_1(x_1,u_0)+ \min_{u_t} f_{t+1}(x_{t+1},u_t),\ldots, \min_{u_{T-1}} f_T(x_T,u_{T-1}) \)
Optymalne rozwiązanie wyznaczymy szukając decyzji, która oprócz lokalnej funkcji celu uwzględnia wartość w kolejnym etapie.
- dla każdego \( x_T\) (stan końcowy) przyjmujemy \( V_T(x_T)=f(x_T)\) (terminal value function)
- do stanu końcowego doprowadza nas decyzja \(u_{T-1}\) podjęta w stanie \(x_{T-1}\)
- dla optymalnej decyzji \(u_{T-1}\) dojścia ze stanu \(x_{T-1}\) do \(x_{T}\) wyznaczymy wartość:
\(V_{T-1}(x_{T-1})=\min_{u_{T-1}}\left\{ V_T(x_T) + f_{T}(x_{T},u_{T-1})\right\}\) - z równania stanu wiemy, że \(x_{t+1} = g(x_t, u_t)\) , czyli:
\(V_{T-1}(x_{T-1})=\min_{u_{T-1}}\left\{V_T(g(x_{T-1},u_{T-1})) + f_{T}((g(x_{T-1},u_{T-1}),u_{T-1})\right\}\) - w ogólnej postaci, rekurencyjne równanie Bellmana zapisujemy jako:
- \( V_t(x_t) = \min_{u_t} \left\{ V_{t+1}(g(x_t,u_t))+f_{t+1}(g(x_t, u_t),u_t)\right\} \)