Podręcznik
Wymagania zaliczenia
3. Symulator
3.2. Struktura symulatora
Ogólny schemat blokowy symulatora TTS został pokazany na rysunku poniżej.
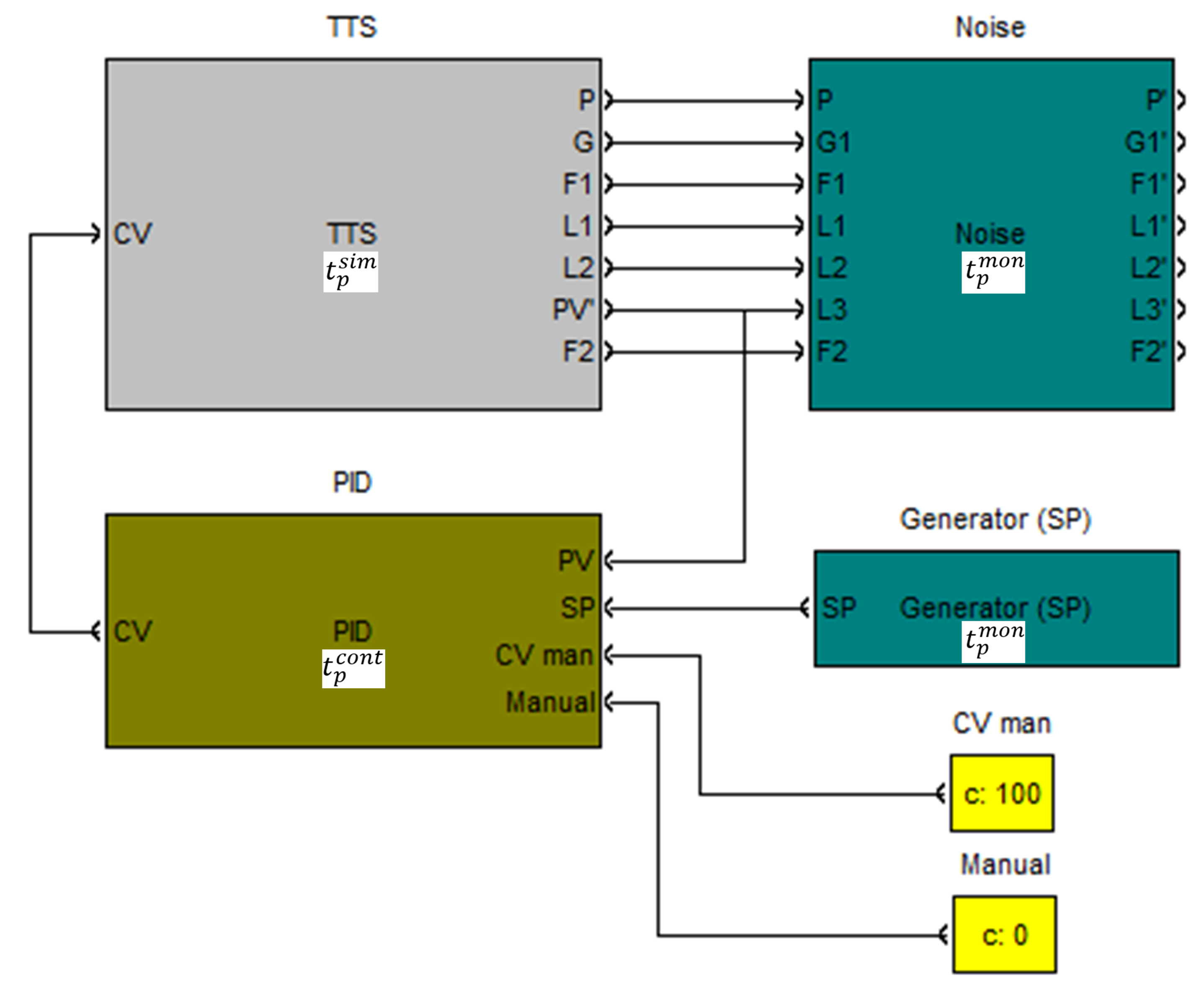
W skład symulatora wchodzą:
- TTS: podsystem obiektu (obejmuje elementy instalacji, wykonawcze oraz pomiarowe),
- PID: podsystem regulatora PID,
- Generator SP: pomocniczy podsystem generatora wartości zadanej SP,
- Noise: podsystem symulacji czujników pomiarowych,
- Manual, CVman: symboliczne oznaczenie sygnałów sterujących (wejściowych) – sygnał trybu pracy regulatora (
PIDmode) oraz wartości sygnału sterującego w trybie pracy ręcznej (CVman).
Powyższe podsystemy zostały zamodelowane w klasie TtsPidSim modułu simulator.py. Na rysunku oznaczono także okresy próbkowania, z którymi poszczególne podsystemy są obliczane. W funkcji inicjalizacyjnej klasy odpowiadają im sekcje:
# SP generator,# Controller path,# Simulator path,# Measurements path.
Cały symulator zaimplementowany jest w postaci klasy TtsPidSim. A jego utworzenie w kodzie wygląda jak na listing poniżej.
# General sampling time [s]
tp = 0.05
# Processing rates: Controller, Monitoring
pr = {'control': 2, 'monit': 20}
system = TtsPidSim(tp, pr)
gdzie:
tp- główny okres próbkowania symulacji \( t_p^{sim} \),pr{control,monit}– krotności przetwarzania dla regulatora i monitorowania, wykorzystywane do obliczenia \( t_p^{cont} = p_{control}t_p^{sim} \) i \( t_p^{mon} = p_{monit}t_p^{sim} \).