Projekt 2
Budowa
i badanie regulatora rozmytego
4. Uwagi
- Regulator rozmyty musi działać w pętli sprzężenia zwrotnego, w każdym kroku symulacji musi wypracować odpowiednie sterowanie. Przygotowany symulator modeluje działanie obiektu (procesu) jak i układu regulacji.
-
Struktura wewnętrzna symulatora składa się ze ścieżek przetwarzania (
Path), które z kolei zbudowane są z poszczególnych bloków funkcyjnych (pochodne klasyBlock). Uproszona wersja struktury, konieczna do zrozumienia jak zaimplementować i uruchomić nowy blok funkcyjny, została przedstawiona na rysunku poniżej. Szczególnym rodzajem bloku funkcyjnego jest podsystem (Subsystem), który zbudowany jest z określonych składowych bloków funkcyjnych. Poszczególne podsystemy zdefiniowane są w postaci odrębnych klas w bibliotece szablonów (templates.py).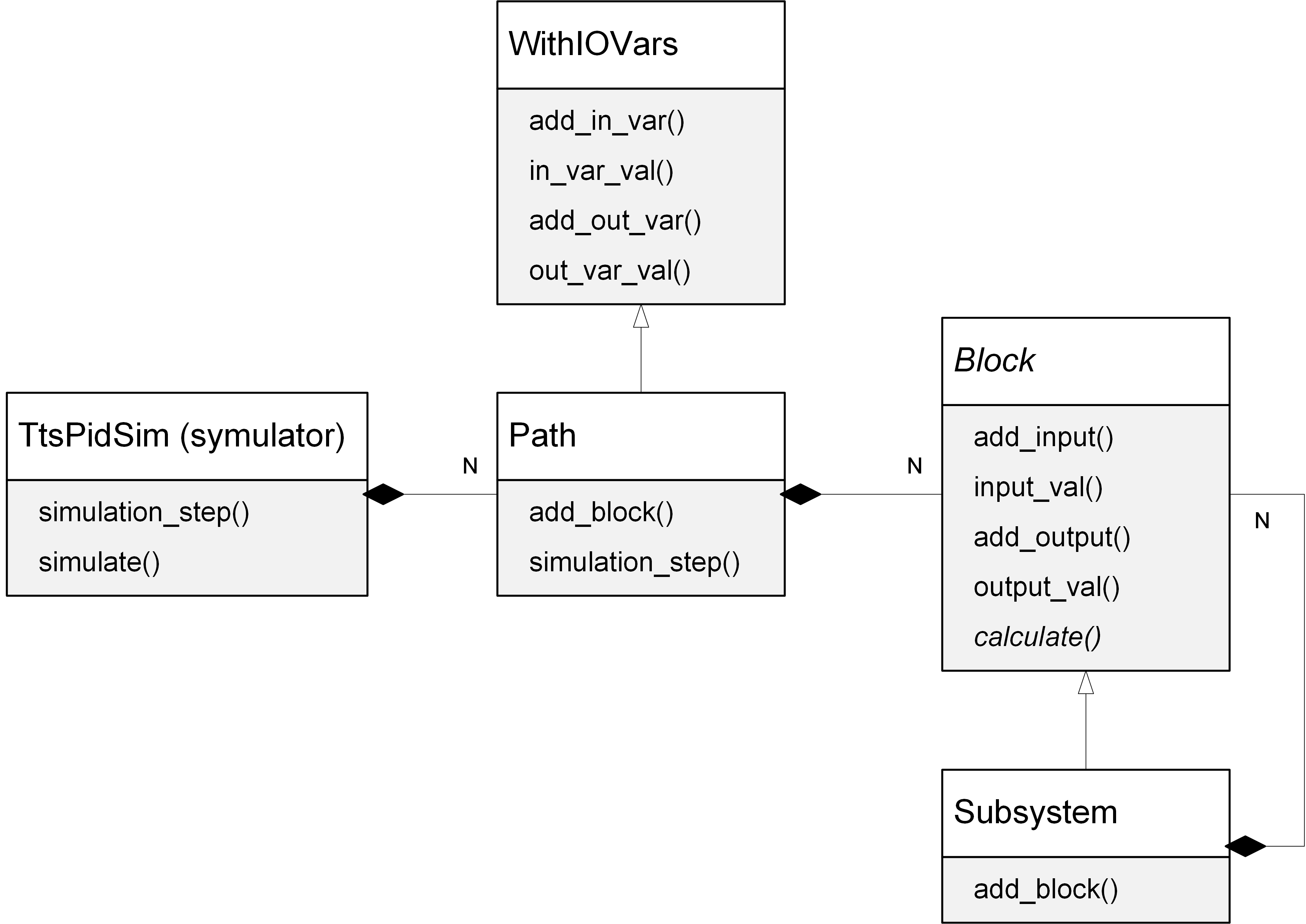
Uproszczony schemat struktury wewnętrznej symulatora -
Przykładem utworzenia podsystemu użytkownika jest szablon regulatora PID – klasa
PID(wtemplates.py). Uproszczony listing klasy pokazano poniżej. Wszystkie elementy składowe regulatora PID i ich konfiguracja zawarte są w konstruktorze__init__().Listing: Definicja klasy PID(skrót)""" Implementation of classical PID controller. """ class PID(Subsystem): """ @param _name unique (in parent object) block name @param _inputs required inputs ([Value, ...]): SP [m], PV [m], mode, cv_man @param _tp sampling time """ def __init__(self, _name, _inputs, _tp): super().__init__(_name, _inputs) # Define processing structure in the form of interconnected subblocks # - add function block sp_filt = self.add_block( FirstOrderInertia('sp_filt', _tp, 1, 0.1) ) # - add block input and connect to subsystem input sp_filt.add_input(self.input(0)) ... # Define subsystem outputs (add and connect to block output): CV [%], e self.add_output(cv.output(0)) self.add_output(e.output(0))Użytkownik odpowiedzialny jest za:
- dodanie poszczególnych bloków składowych,
- podłączenie wejść bloków do wejść podsystemu lub innych bloków,
- zdefiniowanie niezbędnych wyjść podsystemu.
Ważne jest aby nowy regulator rozmyty miał te same wyjścia (i w tej samej kolejności) co regulator klasyczny PID (czyli
CVie, dodatkowo dodano wyjściede) gdyż ma go zastąpić, a inne bloki korzystają z wyjścia regulatora. -
Przykładem zastosowania ścieżki jest ścieżka modułu sterowania (
controller_sim) zdefiniowana w symulatorze. Ze względu na podłączenie kolejnych bloków do wyjścia regulatora zastosowano tą samą nazwę bloku regulatora rozmytego co regulatora PID.Listing: Fragment konstruktora TtsPidSim.__init__()związany z definiowaniem podsystemu sterowania# Controller path # working with tpcont = tpsim * pr.control (default=0.2 [s]) controller_sim = Path('controller_sim', self.pr['control']) self.paths['controller_sim'] = controller_sim # PV measurement. Block also used to make control feedback. pv_noise = controller_sim.add_block( Random('pv_noise', 0, 0.0013333333333) ) pv_measure = controller_sim.add_block( SumDiff('pv_measure', [1, 1]) ) pv_measure.add_input(pv_noise.output(0)) controller = controller_sim.add_block( PID('controller', [sp.output(0), pv_measure.output(0), cvman.output(0)], self.tp*self.pr['control']) ) # add ins/outs: controller parameters self.add_in_var('kp', controller.blocks['kp'].const) self.add_in_var('Ti', controller.blocks['ti'].const) self.add_in_var('Td', controller.blocks['td'].const) self.add_in_var('Bias', controller.blocks['bias'].const) self.add_in_var('Ienable', controller.blocks['i_enable'].const) self.add_in_var('Denable', controller.blocks['d_enable'].const) self.add_in_var('PIDmode', controller.blocks['mode'].const) # - monitoring variables: CV, PV, e self.add_out_var('CV', controller.output(0)) self.add_out_var('PV', pv_measure.output(0)) self.add_out_var('e', controller.output(1)) -
Dodanie nowej struktury przetwarzania, takiej jak regulator rozmyty, można zrealizować poprzez wykorzystanie jednej lub kilku z następujących możliwości:
- dodanie nowego bloku funkcyjnego – wygodne rozwiązanie do realizacji określonych cyklicznych obliczeń na zestawie sygnałów wejściowych i wyznaczających zestaw sygnałów wyjściowych, np. implementacja modelu rozmytego o 2 wejściach i jednym wyjściu,
- dodanie nowej ścieżki – wygodne rozwiązanie do realizacji złożonego przetwarzania składającego się z kilku bloków funkcyjnych (dostępnych w symulatorze lub dodanych przez użytkownika),
- modyfikacja metody
simulation_step()symulatora - nie jest to zalecane podejście, - realizacja przetwarzania poza symulatorem, w tym przypadku symulator działa bez regulatora, a wymiana danych następuje w każdym kroku poprzez zdefiniowane wejścia/wyjścia symulatora - nie jest to zalecane podejście.