Projekt 3
Rozmyte
przełączanie nastaw regulatora PID
5. Przykłady
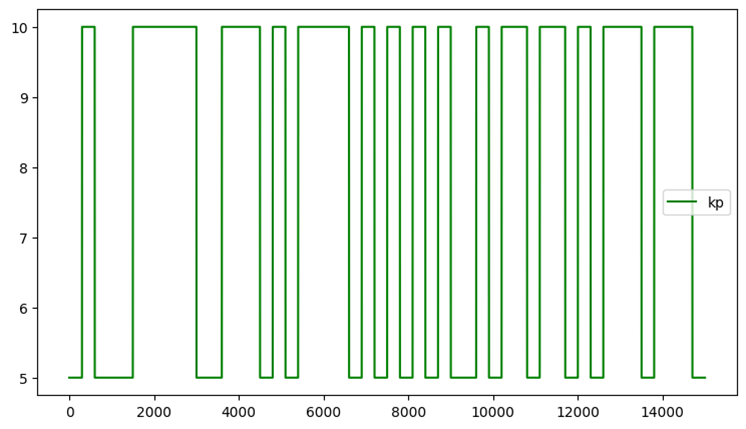
W przykładzie wykorzystano proste przełączanie progowe (nie rozmyte – płynne) nastawy \( k_p \). Założono, że dla skrajnych wartości SP (<0.1 i >0.3) wartość \( k_p=5 \), a dla pozostałego zakresu \( k_p=10 \). Symulację uruchomiono w trybie krokowym. W każdym kroku, w zależności od aktualnej wartości SP ustawiana jest stosowna wartość \( k_p \). Kod zapisano w notebooku Jupyter-a project_3.ipynb.
for i in range(int(tend / tp) + 1):
...
# Ustawienie wartości kp
if sp < 0.1 or sp > 0.3:
k = 5
else:
k = 10
system.in_var_val('kp', k)
kp.append(k)
# Krok symulacji
rval = system.simulation_step(True)
...
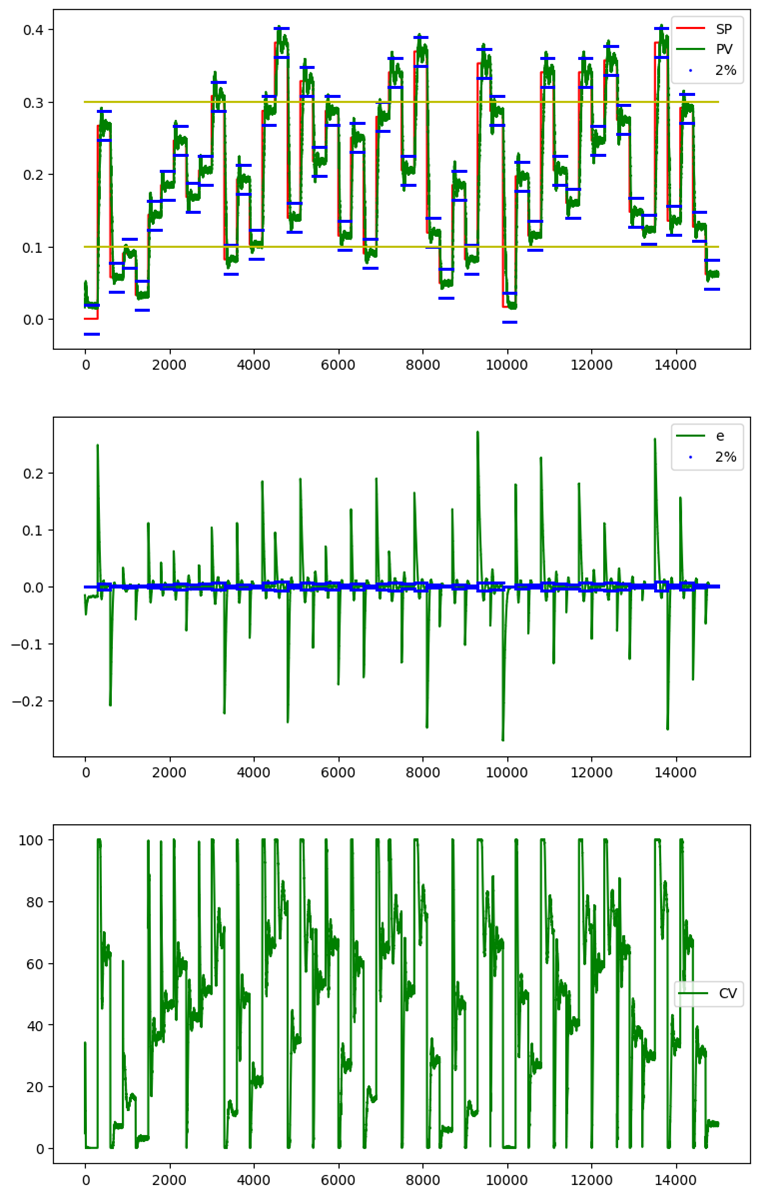
Na rysunku poniżej pokazano podsumowanie działania tak zaprojektowanego układu regulacji. Na wykresie linią żółtą symbolicznie oznaczono zakres zmienności \( k_p \). Na dodatkowym przebiegu widać jak zmienia się wartość wzmocnienia \( k_p \). Jak widać, układ działa, chociaż jakość regulacji pozostawia sporo do życzenia.