Podręcznik
2. Sygnały i ich charakterystyki
2.4. Operacja splotu i jej zastosowanie do opisu układów liniowych
Istotną klasą systemów w przetwarzaniu sygnałów są systemy liniowe i niezmiennicze w czasie (LTI, ang. Linear Time-Invariant). Systemy LTI to takie, które spełniają dwa podstawowe warunki:
1. liniowość, na którą składa się jednorodność i addytywność:
-
jeżeli sygnał wejściowy \( x(t) \) systemu jest skalowany za pomocą stałego czynnika \( a \), wówczas sygnał wyjściowy \( y(t) \) również jest skalowany przez ten czynnik:
\( H(x(t)) = y(t)\quad\Rightarrow\quad H(a x(t)) = a\cdot y(t) \) -
jeżeli sygnał wejściowy systemu jest sumą sygnałów \( x_1(t) \) i \( x_2(t) \), to aby ten system był addytywny, jego sygnał wyjściowy musi być sumą poszczególnych sygnałów wyjściowych:
\( \begin{cases} H(x_1(t)) = y_1(t) \\ H(x_2(t)) = y_2(t) \end{cases}\quad\Rightarrow\quad H(x_1(t)+x_2(t)) = H(x_1(t)) + H(x_2(t)) = y_1(t) + y_2(t) \)
2. niezmienniczość w czasie:
-
przesunięcie sygnału \( x(t) \) o \( t_0 \) powoduje tylko przesunięcie wyjścia \( y(t) \) o \( t_0 \), bez zmiany kształtu:
\( H(x(t)) = y(t)\quad\Rightarrow\quad H(x(t - t_0)) = y(t - t_0) \)
Powyższe warunki składają się na zasadę superpozycji, którą można analogicznie wyprowadzić dla systemów dyskretnych.
Jeżeli system jest liniowy i niezależny od czasu, to kluczowe staje się pojęcie odpowiedzi impulsowej (ang. Impulse Response). Jest to odpowiedź systemu na pobudzenie w formie impulsu jednostkowego, nazywanego również deltą Diraca (dystrybucja delta) \( \delta(t) \):
Delta Diraca nie jest funkcją w klasycznym sensie, ale idealizowanym impulsem o nieskończonej amplitudzie i zerowej szerokości – używamy jej przybliżenia. Najczęściej do wizualizacji używa się wąskiego i wysokiego impulsu, np. prostokątnego (rys. 2.4) lub funkcji Gaussa (rys. 2.5).
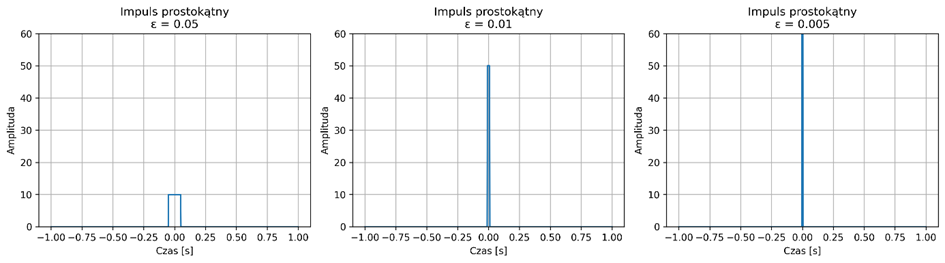
Rys. 2.4. Sekwencja przybliżeń delty Diraca przy użyciu coraz wyższych i węższych impulsów prostokątnych
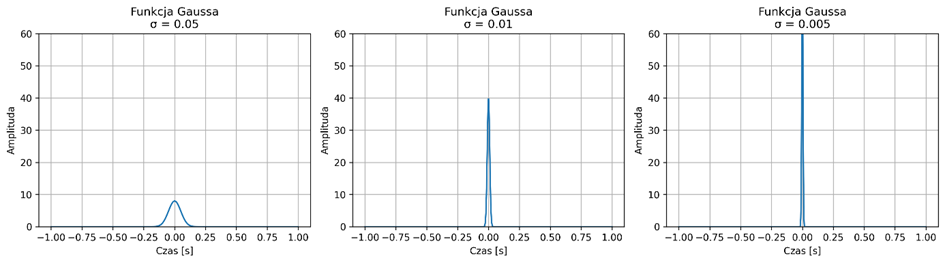
Rys. 2.5. Sekwencja przybliżeń delty Diraca przy użyciu coraz wyższych i węższych krzywych Gaussa
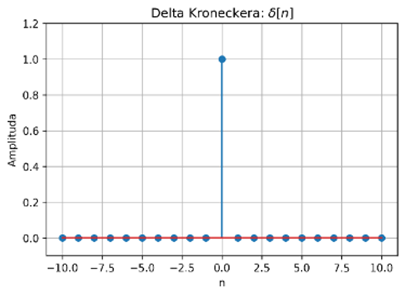
W przypadku sygnałów dyskretnych mamy do czynienia z deltą Kroneckera \( \delta[n] \):
której graficzne przedstawienie zostało pokazane na rys. 2.6. Sygnał ten jest podstawą koncepcji odpowiedzi impulsowej oraz splotu dyskretnego.
Odpowiedź impulsową oznaczamy \( h(t) \) lub \( h[n] \), odpowiednio dla sygnałów ciągłych i dyskretnych. Jeżeli znamy odpowiedź impulsową systemu LTI, to odpowiedź systemu na pobudzenie dowolnym sygnałem możemy obliczyć jako splot tego sygnału z odpowiedzią impulsową.
Splot (ang. Convolution) jest jednym z fundamentalnych pojęć teorii sygnałów. Jest to operacja matematyczna, która oblicza odpowiedź systemu liniowego na dowolny sygnał wejściowy, nakładając odpowiedź impulsową przesuniętą w czasie.
Splot dla:
- sygnałów ciągłych:
- sygnałów dyskretnych:
gdzie \( x \) jest sygnałem wejściowym, \( h \) jest odpowiedzią impulsową systemu oraz \( y \) jest sygnałem wyjściowym, będącym wynikiem splotu. Nakładając odpowiedź impulsową \( h \) na każdą próbkę sygnału \( x \), przesuwając ją w czasie (ciągłym lub dyskretnym) i sumując wpływ wszystkich tych przesunięć, otrzymujemy wynik operacji splotu. Kluczowa jest kolejność wykonywania działań:
1. odwróć w czasie drugi z sygnałów ze względu na \( \tau \) lub \( k \):
2. przesuń go w czasie o czas \( t \) lub o \( n \) próbek:
3. wymnóż pierwszy sygnał ze zmodyfikowanym drugim:
4. scałkuj wynik mnożenia lub zsumuj wszystkie iloczyny próbek.
Znajomość pojęcia splotu pozwala na zrozumienie podstawowych właściwości impulsu Diraca:
-
splot z \( \delta(t) \) – impuls Diraca jest elementem identycznościowym operacji splotu:
\( x(t)\ast \delta(t) = x(t) \) -
splot z przesuniętą deltą \( \delta(t - t_0) \) przesuwa sygnał w czasie o \( t_0 \):
\( x(t)\ast \delta(t - t_0) = x(t - t_0) \)
Zatem, skoro impuls jednostkowy jest sygnałem, który podany na wejście dowolnego liniowego i niezmienniczego w czasie układu powoduje wygenerowanie odpowiedzi równej odpowiedzi impulsowej tego układu:
to odpowiedź takiego systemu na dowolny sygnał wejściowy \( x(t) \) jest jego splotem ze znaną odpowiedzią impulsową \( h(t) \):
W przypadku sygnałów dyskretnych opis systemów LTI za pomocą splotu jest analogiczny:
Oznacza to, że:
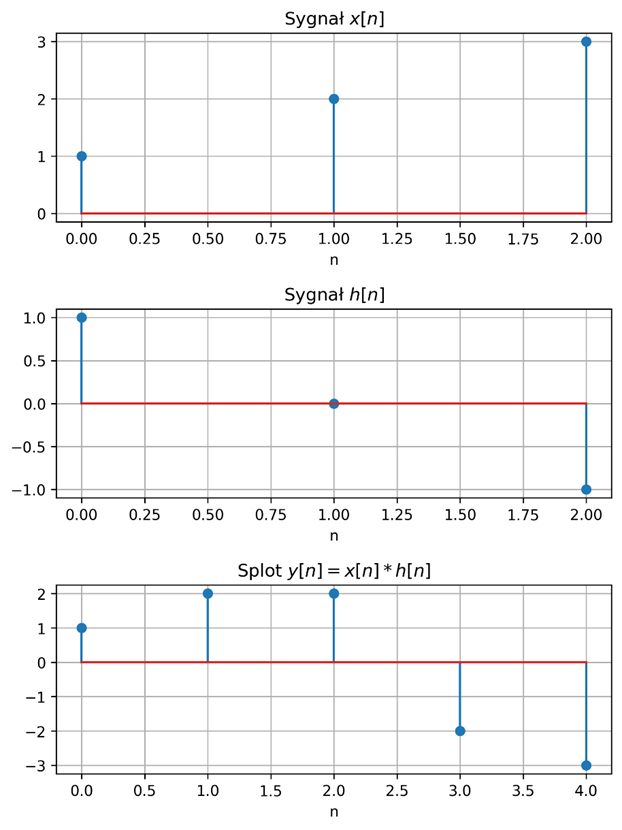
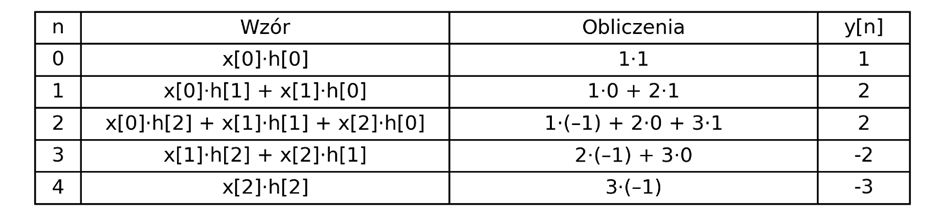
Ponieważ \( x[k] \) i \( h[k] \) mają tylko 3 niezerowe próbki, splot będzie miał długość:
otrzymamy kolejne wartości sygnału \( y[n] \). Kolejne kroki zostały przedstawione w tabeli:
Poniżej przedstawiono wykresy sygnałów i ich splotu: