Podręcznik
1. Równania stanu dla obiektów nieliniowych
1.2. Przykład modelowania wahadła matematycznego
W niniejszej sekcji sformułujemy model odwróconego wahadła matematycznego w postaci równań stanu. Schemat wahadła został przedstawiony na Rys. 1.5.
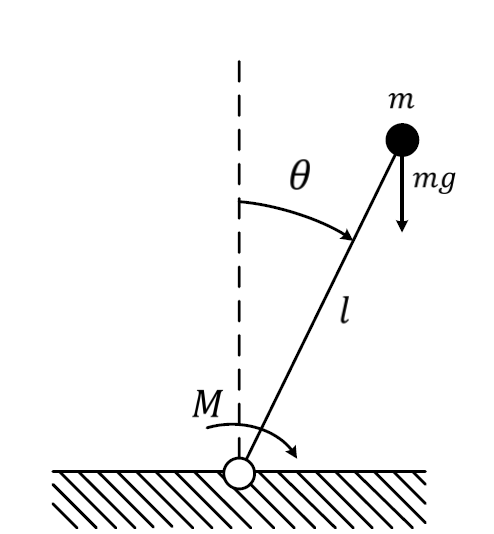
Rysunek 1.5 Schemat wahadła matematycznego.
Masa \( m \) jest osadzona na sztywnym przegubowym pręcie o długości \( l \) (pomijamy masę pręta). W przegubie podawany jest sterowany moment siły \( M \), a na masę \( m \) działa siła przyciągania ziemskiego (\( g \) - przyciąganie ziemskie). W przegubie generuje się też moment tarcia proporcjonalny do prędkości kątowej wahadła. Kąt odchylenie pręta od osi pionowej jest oznaczony jako \( \theta \). Równanie fizyczne opisujące układ to równanie Newtona dla ruchu obrotowego. Ogólna postać tego równania to
\( \begin{equation} I\epsilon(t) = \sum_{i} M_i(t) \qquad(1.25) \end{equation} \)
tzn. iloczyn momentu bezwładności ciała \( I \) i przyśpieszenia kątowego \( \epsilon \) jest równy sumie momentów sił \( M_i \) działających na ciało. Moment bezładności wahadła obliczamy przy upraszczającym założeniu o punktowości masy \( m \) i pomijalnej masie pręta. W takim przypadku mamy
\( \begin{equation} I = ml^2 \qquad(1.26) \end{equation} \)
przyśpieszenie kątowe jest równe drugiej pochodnej położenia kątowego
\( \begin{equation} \epsilon(t) = \dfrac{d^2\theta(t)}{dt^2} \qquad(1.27) \end{equation} \)
Na ciało działa moment bezwładności w przegubie \( M \), moment tarcia \( M_t \) oraz moment siły generowany przez siłę przyciągania ziemskiego \( M_g \)
\( \begin{equation} \sum_{i} M_i(t) = M(t) + M_t(t) + M_g(t) \qquad(1.28) \end{equation} \)
Moment tarcia jest proporcjonalny do prędkości kątowej \( \omega \), ze współczynnikiem proporcjonalności \( D \)
\( \begin{equation} M_t(t) = -D\omega(t) = -D\dfrac{d\theta(t)}{dt} \qquad(1.29) \end{equation} \)
Znak minus wskazuje na to, że moment tarcia działa przeciwnie do aktualnej prędkości kątowej. Moment siły od grawitacji jest równy iloczynowi siły ciążenia \( F_g=mg \), długości ramienia \( l \) na którym działa siła grawitacji oraz sinusowi kąta pomiędzy ramieniem a wektorem siły
\( \begin{equation} M_g(t) = F_g\cdot l \cdot sin\theta(t) = mglsin\theta(t) \qquad(1.30) \end{equation} \)
Wstawiając zależności (1.26)-(1.30) do równania (1.25) otrzymujemy
\( \begin{equation} ml^2 \dfrac{d^2\theta(t)}{dt^2} = mglsin\theta(t) - D \dfrac{d\theta(t)}{dt} + M(t) \qquad(1.31) \end{equation} \)
Po podzieleniu obu stron równania przez \( ml^2 \) otrzymujemy
\( \begin{equation} \dfrac{d^2\theta(t)}{dt^2} = \dfrac{g}{l}sin\theta(t) - \dfrac{D}{ml^2} \dfrac{d\theta(t)}{dt} +\dfrac{1}{ml^2} M(t) \qquad(1.32) \end{equation} \)
Równanie różniczkowe (1.32) jest równaniem drugiego rzędu. Równania stanu są równaniami pierwszego rzędu. Możemy przekształcić równanie (1.32) do dwóch równań pierwszego rzędu poprzez wprowadzenie do równań zmiennej oznaczającej prędkość kątowej
\( \begin{equation} \omega = \dfrac{d\theta(t)}{dt} \qquad(1.33) \end{equation} \)
Pierwsza pochodna prędkości kątowej jest równa drugiej pochodnej położenia kątowego
\( \begin{equation} \dfrac{d\omega(t)}{dt} = \dfrac{d^2\theta(t)}{dt^2} \qquad(1.34) \end{equation} \)
Wprowadzając powyższe zależności do (1.32) otrzymujemy równania stanu wahadła
\( \begin{eqnarray} \dfrac{d\theta(t)}{dt} &=& \omega(t) \qquad(1.35)\\ \dfrac{d\omega(t)}{dt} &=& \dfrac{g}{l}sin\theta(t) - \dfrac{D}{ml^2} \omega(t) +\dfrac{1}{ml^2} M(t) \qquad(1.36) \end{eqnarray} \)
W opisie wahadła zmiennymi stanu są \( \theta \) oraz \( \omega \), sygnałem sterującym jest moment siły \( M \), natomiast stałymi są \( g \), \( l \), \( m \) oraz \( D \). Jako sygnał wyjściowy z układu przyjmujemy położenie kątowe \( \theta \). Aby rozwiązać równania stanu, konieczne jest określenie warunków początkowych dla zmiennych stanu tzn. wielkości \( \theta(t_0) \)oraz \( \omega(t_0) \), gdzie \( t_0 \) jest wybraną chwilą początkową. Konieczna jest też znajomość wartości sygnału sterującego \( M(t) \) na całym rozważanym horyzoncie czasu.
Równania stanu dla wahadła można rozwiązać numerycznie w środowisku MATLAB®. Na potrzeby symulacji przyjmujemy następujące wartości parametrów obiektu \( m = 0.1 \), \( l = 1 \), \( g = 10 \), \( D = 0.1 \). Na Rys. 1.6 przedstawiono przykładowe trajektorie stanów obiektu uzyskane dla stałego momentu \( M(t) = -0.5\) i warunków początkowych \( \theta(t_0) = \dfrac{\pi}{2} \), \( \omega(t_0) = 0 \)
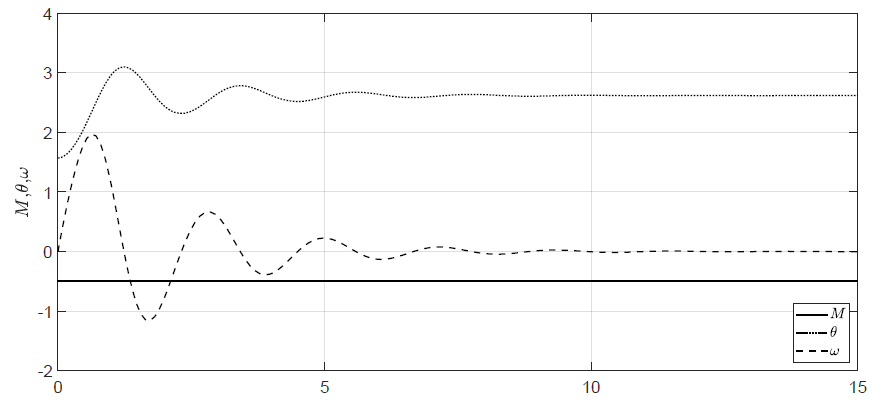
Rysunek 1.6 Trajektorie położenia i prędkości kątowej wahadła dla stałego sterowania.
Wahadło znajdujące się początkowo w położeniu horyzontalnym spada w dół, gdyż moment od siły ciążenia przeważa nad momentem generowanym w przegubie. Następnie, ze względu na obecność tarcia w przegubie, wahadło wykonuje oscylacje gasnące. Wreszcie wahadło stabilizuje się w położeniu, w którym moment od siły ciążenia i \( M \) wyrównują się. Po ustabilizowaniu się wahadła w pewnym położeniu kątowym, jego prędkość kątowa wynosi 0.
Na Rys. 1.7 przedstawione zostały trajektorie stanów obiektu dla warunków początkowych \( \theta(t_0) = \dfrac{\pi}{2} \), \( \omega(t_0) = 0 \) i sygnału sterującego typu fala prostokątna. Amplituda wahań \( M(t) \) wokół wartości -0.5 wynosi 0.1. Wypełnienie fali wynosi 50 %, natomiast jej okres wynosi 2. Po początkowej fazie przejściowej wahadło wykonuje oscylacje o ustalonej amplitudzie.
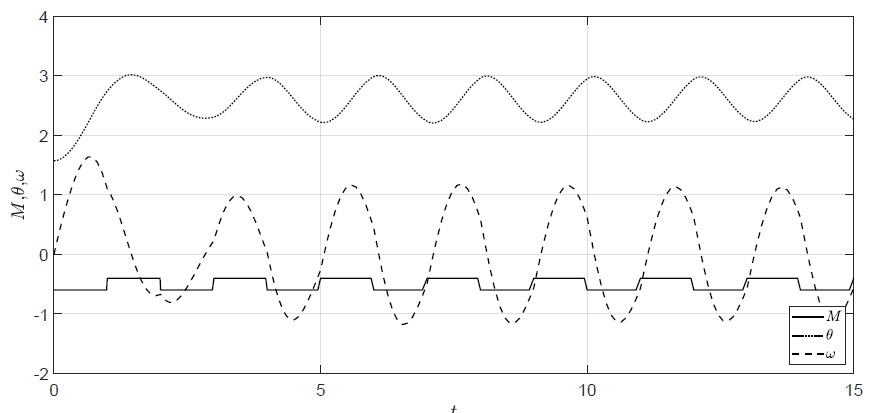
Rysunek 1.7 Trajektorie położenia i prędkości kątowej wahadła dla sterowania w kształcie fali prostokątnej.