Podręcznik Grafika komputerowa i wizualizacja
Rozdział 3. ELEMENTY GEOMETRII OBLICZENIOWEJ
3.4. Zorientowanie punktów na płaszczyźnie
Drugim bardzo prostym zagadnieniem, które często
występuje w zagadnieniach graficznych jest określenie zorientowania trójki
punktów na płaszczyźnie (rys.3.4). Dane są trzy punkty na płaszczyźnie, należy
określić ich zorientowanie. Oczywiście należy pamiętać o przypadkach
szczególnych, stąd rozpatruje się punkty różne i niewspółliniowe. Zadanie to ma
oczywiście eleganckie rozwiązanie w postaci wektorowej. Wystarczy wyznaczyć dwa
wektory rozpięte na badanych trzech punktach, a następnie obliczyć ich iloczyn
wektorowy. Analiza zwrotu wektora wynikowego pozwala określić poszukiwane
zorientowanie.
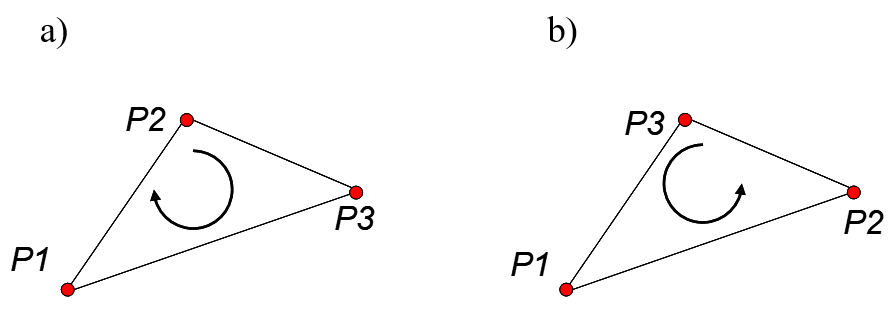
Rys.3.4. Zorientowanie punktów a) zgodnie z ruchem wskazówek zegara, b) przeciwne do ruchu wskazówek zegara.
Zastosowanie macierzy współrzędnych (przez analogię do macierzy określającej iloczyn wektorowy) upraszcza obliczenia.
Niech dane będą trzy niewspółliniowe punkty P1[x1,y1], P2[x2,y2], P3[x3,y3]. Zadaniem jest określenie zorientowania (rys.3.4).
Można wyznaczyć macierz M :

Analiza wyznacznika tej macierzy pozwala w prosty sposób rozwiązać zadanie.
- Jeśli det M > 0 mówimy o dodatnim zorientowaniu (lewoskrętnym lub przeciwnym do ruchu wskazówek zegara (CCW – counter-clockwise).
- Jeśli det M < 0 mówimy o ujemnym zorientowaniu (prawoskrętnym lub zgodnym z ruchem wskazówek zegara (CW – clockwise).