Podręcznik Grafika komputerowa i wizualizacja
Rozdział 6. MODELOWANIE OBIEKTÓW
6.4. Reprezentacja brzegowa
Reprezentacja
brzegowa (ang. b-rep – boundary representation) opisuje obiekt za pośrednictwem
opisu jego brzegu – powierzchni ograniczającej obiekt (rys.6.6). Możemy tu mieć do czynienia z modelem wielościennym (ang. polygonal representation) lub
powierzchniowym, w którym kształt brzegu obiektu jest opisany parametrycznie.
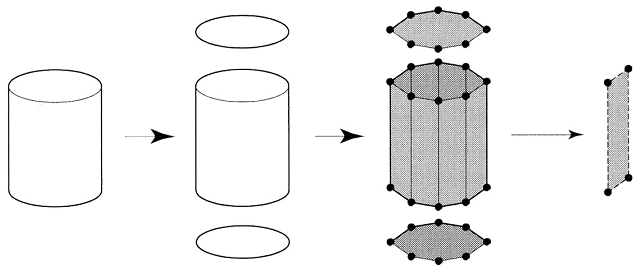
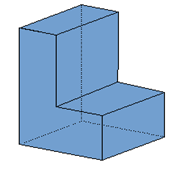
Rys.6.6. Bryła modelowana jako zbiór powierzchni
formujących jej brzeg.
Bryła => Powierzchnie
=> Wielokąty =>
Węzły (Krawędzie).
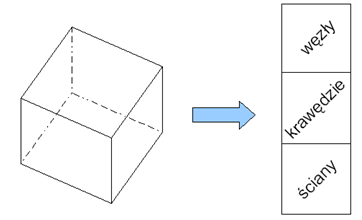
Rys.6.7. Bryła reprezentowana przez jej powierzchnię
brzegową.
Dla wielościanu struktura danych pozwala zapamiętać listy (lub
tablice) węzłów, krawędzi i ścian.
Dla modelu wielościennego istotnym problemem jest organizacja struktury danych zapamiętującej obiekt. Realizowane jest to w postaci list lub tablic ścian, krawędzi i wierzchołków. Pamiętanie powiązań między elementami obiektów prowadzi do struktur redundantnych. Wiąże się to oczywiście ze wzrostem kosztu pamięciowego. Czasami celowo wprowadzane są struktury redundantne w celu przyspieszenia wyszukania elementów. Takimi strukturami są na przykład DCEL (double connected edg list) i struktura krawędziowa Baumgarta. Są to struktury, w których deskryptory krawędzi zawierają wskazania na sąsiednie krawędzie, węzły i ściany (rys.6.8).
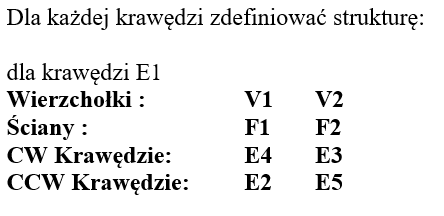
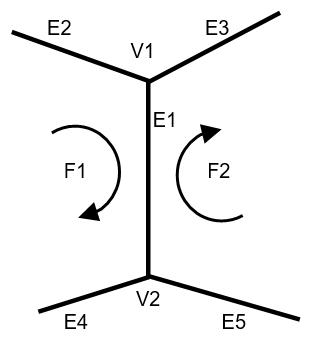
Rys.6.8. „Skrzydlata gałąź” Baumgarta (zaproponowana w 1972).
Zastosowanie tego typu struktur danych ułatwia wyszukiwanie określonych ciągów elementów. Np. korzystając ze skrzydlatej gałęzi Baumgarta można szybko wyznaczyć pętlę krawędzi dla ściany, albo pętlę krawędzi dla wierzchołka.
Model wielościenny może być reprezentowany dowolną siatką wielokątów. Rodzaj siatki zależy od budowy obiektu i sposobu jego definiowania. Przypisanie położenia poszczególnym punktom i powiązań tworzących siatkę może być realizowane ręcznie przez konstruktora. Może wynikać z matematycznego opisu obiektu – można wykorzystać charakterystyczne przekroje obiektu, albo linie stałego parametru. Może to być zrealizowane automatycznie na podstawie pomiarów położenia i kształtu obiektu rzeczywistego lub jego modelu. Często wykorzystywane są siatki trójkątów, gdyż przy dowolnym rozmieszczeniu węzłów siatka taka gwarantuje, że każde jej oczko zawsze będzie figurą płaską – wielokątem.
Problemem na który często jest zwracana uwaga jest trudna weryfikacja poprawności struktury B-rep
- Poprawność topologiczna:
- Problemy struktury – połączenia między elementami (np. wierzchołkami) muszą być zgodne z budową i pozostałymi elementami obiektu.
- Problem orientacji – sąsiadujące elementy muszą dawać zgodność orientacji.
-
Poprawność geometryczna:
- Położenia muszą odpowiadać oczekiwaniom budowy obiektu.
- Wyznaczone położenie i orientacja muszą być zgodne z topologią.
Wyróżnia się wielościan zwykły (prosta bryła Eulera) dla którego :
- ściany ograniczone zamkniętą łamaną krawędzi,
- każda krawędź łączy dokładnie dwie ściany,
- każda krawędź łączy dokładnie dwa wierzchołki,
- każdy wierzchołek łączy co najmniej 3 krawędzie,
- nie występują otwory w ścianach ani tunele w bryle,
- dowolne dwa punkty bryły można połączyć łamaną zawartą w bryle.
Reguła Eulera
w-k+s=2
gdzie:
w — liczba wierzchołków,
k — liczba krawędzi
w=12. k=18, s=8
Uogólniona reguła Eulera
w-k+s=2 . (c-t)+d
gdzie:
c — liczba rozłącznych elementów składowych,t — liczba tuneli (w bryle),
d — liczba dziur (w ścianach)
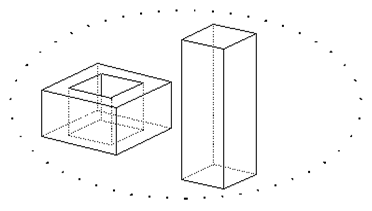
w=24, k=36, s=16, c=2, t=1, d=2
Rys.6.9.Reguła Eulera i uogólniona reguła Eulera.
Dla każdego wielościanu zwykłego spełniona jest reguła Eulera. Rozszerzoną klasę obiektów - rozmaitości dwuwymiarowych obowiązuje uogólniona (rozszerzona) reguła Eulera (rys.6.9).
Należy jednak pamiętać że spełnienie tych warunków jest warunkiem koniecznym ale niewystarczającym przynależności do odpowiedniej klasy. Na przykład sześcian, do którego krawędzi doczepiono prostokąt nie jest już wielościanem zwykłym ale regułę Eulera (podstawową) spełnia.
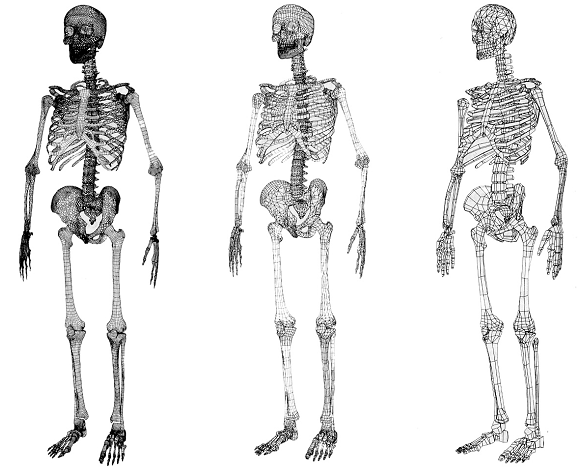
141788 wielokątów 35305 wielokątów 8993 wielokąty
Rys.6.10. Problem aproksymacji kształtu przy modelu
wielościennym.
Rysunek pochodzi z Viewpoint Digital’s catalogue.
Reprezentacja brzegowa jest bardzo efektywna dla obiektów (brył)
wielościennych. Dla innych wymagana jest aproksymacja kształtu (np. dla
obiektów typu kula czy obiekty obrotowe. Jeśli chcemy oddać kształt obiektu w
sposób satysfakcjonujący, to wymagana jest duża liczba wielokątów (rys.6.10). Przy
źle zaprojektowanej reprezentacji właściwości modelu wielościennego (i
aproksymacji kształtu) mogą prowadzić do utraty cech wizualnych obiektu.
Reprezentacja
brzegowa jest często łączona w systemach modelowania z konstruktywną geometrią
brył.
Podsumowując, właściwości reprezentacji brzegowej można scharakteryzować w następujący sposób
- Zalety
- Prosta (intuicyjna) definicja obiektu (Formalna definicja powierzchni obiektu).
- Prosta i efektywna (szybka) wizualizacja (są zdefiniowane ściany i ich właściwości).
- Możliwe operacje boolowskie (ale nie są proste !)
-
Wady
- Aproksymacja obiektu 3D (w zależności od możliwości opisu powierzchni brzegowej).
- Problem poprawności reprezentacji.
- Problemy numeryczne wpływające na skomplikowanie reprezentacji i wizualizację.
- Reprezentacja mało zwięzła.