Podręcznik
5. Inne struktury sieci
5.1. Modelowanie dynamiki w perceptronie wielowarstwowym
Na początku wróćmy do struktury perceptronu wielowarstwowego i zastanówmy się jak można ją wykorzystać do modelowania dynamiki. Sygnały pomiarowe w automatyce (np. ciśnienia, temperatury) i robotyce (np. położenia, prędkości) odwzorowują zmienne dynamiczne, czyli takie, że ich wartości zależą od aktualnych wejść oraz pewnej funkcji stanu obiektu. W podstawowym ujęciu perceptron realizuje odwzorowanie statyczne, czyli uwzględnia sygnały wejściowe, ale nie uwzględnia stanu.
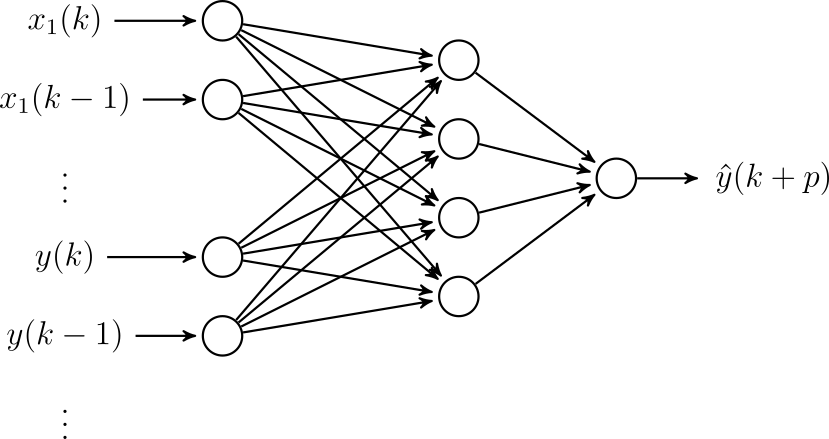
Najprostsze podejście do modelowania dynamiki zostało przedstawione na rysunku 24. W celu modelowania dynamiki wprowadzamy na wejścia opóźnione próbki sygnałów (można również podać opóźniony sygnał wyjściowy). Na rysunku \( k \) oznacza aktualną chwilę czasu, a \( p \) horyzont predykcji (chcemy przewidywać wartość \( y \) na \( p \) kroków w przód.
Wśród innych metod modelowania dynamiki z wykorzystaniem sieci neuronowych możemy wymienić:
sieci globalnie rekurencyjne (ze sprzężeniem z wyjścia na wejście),
splot 1D (jak filtracja sygnału w dziedzinie czasu),
sieci o neuronach rekurencyjnych (rozdział 5.4),
oraz sieci z mechanizmem atencji jak transformery.
Jednak podejście z perceptronem wielowarstwowym jest koncepcyjnie i realizacyjnie najprostsze, a modele te mogą mieć mało parametrów i szybko się uczyć, więc jest to podejście, które polecam przynajmniej jako pierwszą próbę.