Podręcznik
Wstęp do logiki rozmytej
6. Przykłady zastosowań logiki rozmytej
6.2. Układ regulacji poziomu stali w kokili odlewniczej
Źródło: Kiupel N., Frank P. PI Fuzzy D, International Workshop on Fuzzy Technologies in Automation and Intelligent Systems, Fuzzy Duisburg '94, s. 272..384, Uniwersytet w Duisburgu, 1994.
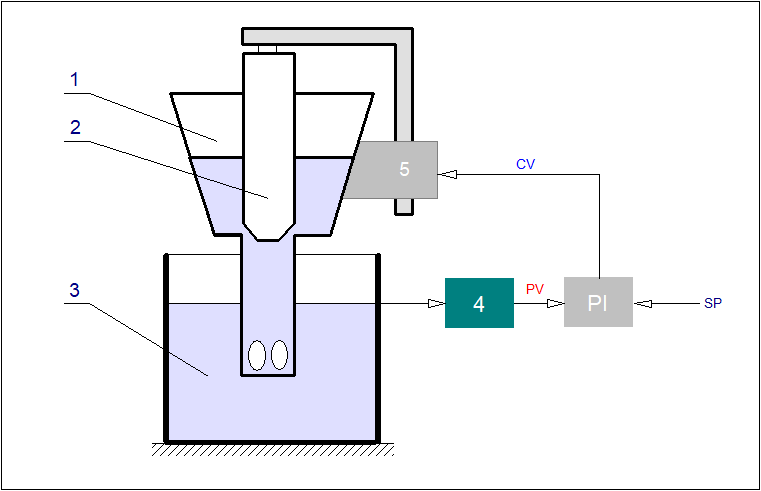
W procesie ciągłego odlewania stali do regulacji poziomu stali w kokili odlewniczej stosowany jest układ konwencjonalnego regulatora PI. W stanach ustalonych odchyłka regulacji poziomu stali (±1,5 mm) jest wystarczająco mała dla zapewnienia odpowiednio wysokiej jakości produkowanej blachy stalowej. Stosunkowo rzadko zdarzają się jednak istotne zakłócenia procesu polegające na gwałtownym zwiększeniu poziomu stali w kokili. Główną przyczyną tak istotnych zakłóceń jest zjawisko okresowego i gwałtownego odrywania się osadów z powierzchni grzyba zaworu w układzie zasilania kokili (Rys. 43). Zakłócenia te są o tyle groźne, że nie mogą być dostatecznie szybko i skutecznie skompensowane w klasycznym układzie regulacji z regulatorem PI.
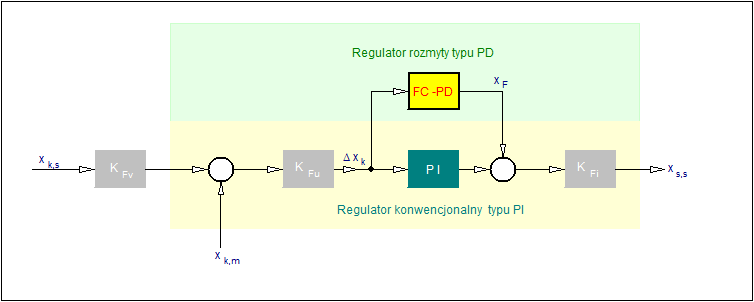
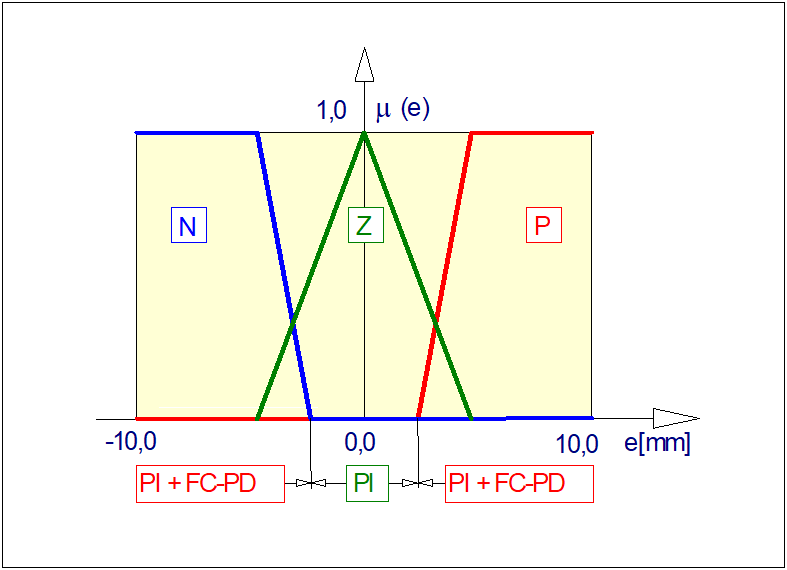
W pierwszym podejściu próbowano skonstruować rozmyty regulator nieliniowy o algorytmie zbliżonym do PI zastępujący regulator klasyczny. Regulator rozmyty przy zwiększonej niewrażliwości zakłóceniowej wykazywał większe odchyłki w stanach ustalonych i odwrotnie. Satysfakcjonującego rozwiązania tzn. małej odchyłki regulacji w stanach ustalonych i wysokiej odporności zakłóceniowej niestety nie dało się uzyskać. W związku z tym przyjęto koncepcję hybrydowego rozmytego regulatora PID złożonego z konwencjonalnego regulatora typu PI i rozmytej akcji różniczkującej (Rys. 44). W regulatorze tym akcja różniczkująca FC-PD jest dołączana do regulatora PI, tylko wówczas, gdy poziom odchyłki regulacji poziomu stali przekroczy pewną wartość progową (\( \pm 4 mm \)) (Rys. 45).
Zastosowano tu ciekawą technikę płynnego kształtowania właściwości dynamicznych regulatora (jego struktury) w zależności od wartości odchyłki regulacji. Dla odmiany w rozdziale 6.1 przedstawiono technikę rozmytego strojenia parametrów regulatora o stałej strukturze.
Na Rys. 46 przedstawiono funkcje przynależności wejścia i wyjścia części różniczkującej zastosowanego regulatora, a w Tab. 16 bazę reguł tego regulatora.
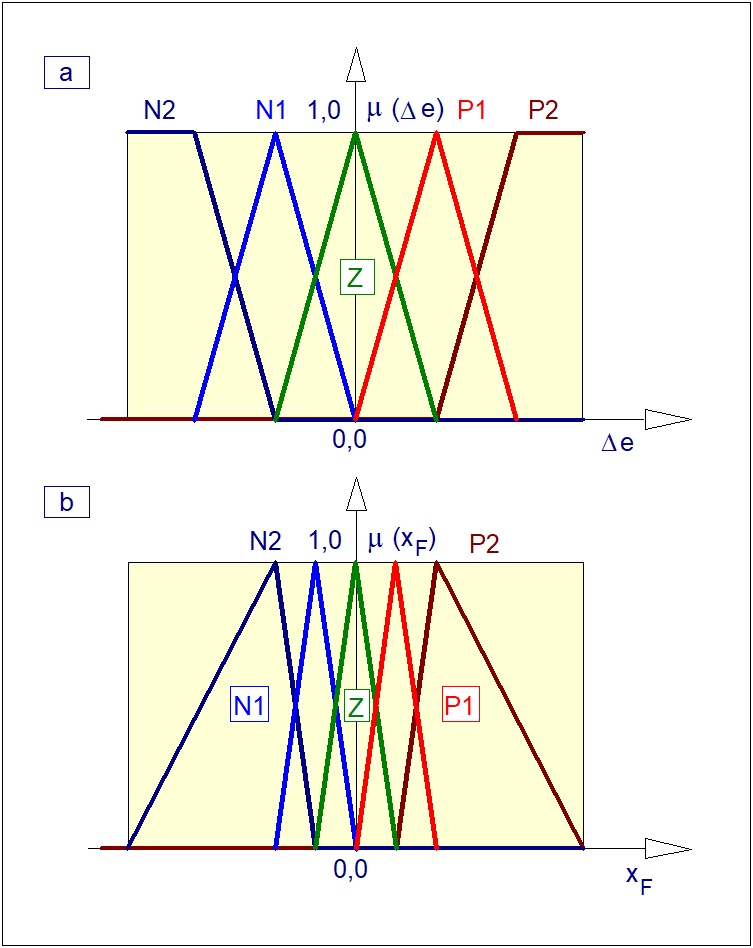
a) Funkcje przynależności wejścia \( \Delta e \)
b) Funkcje przynależności wyjścia \( x_F \) .
| Regulator rozmyty typu PI-FC-D |
\( e \) | |||
|---|---|---|---|---|
| \( N_e \) | \( Z_e \) | \( P_e \) | ||
| \( \Delta e \) | \( N2_{\Delta e} \) | \( N2_F \) | \( Z_F \) | \( Z_F \) |
| \( N1_{\Delta e} \) | \( N2_F \) | \( Z_F \) | \( Z_F \) | |
| \( Z_{\Delta e} \) | \( N2_F \) | \( Z_F \) | \( P1_F \) | |
| \( P1_{\Delta e} \) | \( N1_F \) | \( Z_F \) | \( P1_F \) | |
| \( P2_{\Delta e} \) | \( Z_F \) | \( Z_F \) | \( P1_F \) | |
Z bazy reguł wynika, że w przypadku zerowej odchyłki regulacji wyjście regulatora rozmytego przyjmuje wartość zerową niezależnie od pochodnej odchyłki regulacji. Dotyczy to oczywiście przypadku gdy odchyłka regulacji nie przekracza wartości ±4mm. Jeśli natomiast odchyłka jest dostatecznie ujemna i ujemna jest pochodna tej odchyłki to sterowanie xF wywołuje przemieszczenie grzyba zaworu w dół w celu ograniczenia dopływu stali do kokili i zapobieżenia nadmiernemu wzrostowi poziomu stali. Ze względu na nieliniową charakterystykę sterowania grzyba, funkcje przynależności (Rys. 46) są asymetryczne. Wyniki badań symulacyjnych wskazały, że zastosowanie regulatora rozmytego w tym przypadku pozwoliło na zmniejszenie maksymalnej odchyłki regulacji w odpowiedzi na wymuszenie skokowe nawet o 50%.
Niewątpliwą zaletą tego rozwiązania jest to, że proponuje ono rozwiązanie rgulatora, który w istotny sposób poprawia odporność istniejącego układu regulacyjnego na zakłócenia. Taki, ewolucyjny sposób wdrożenia regulatorów rozmytych jest, jak się wydaje, akceptowalny w praktyce przemysłowej.