Podręcznik
Wstęp do logiki rozmytej
6. Przykłady zastosowań logiki rozmytej
6.3. Układ przeciwdziałania blokadzie kół firmy Nisssan
Źródło: Dewitz H., Kasper C, Lieven K.: Entwicklungen und Applikationen von Hardware-Lösungen mit integrierter Fuzzy-Logik. Studie der Fuzzy-Initiative NRW, Düsseldorf, 1993, s. 62.
W przypadku silnego i gwałtownego hamowania pojazdu pojawia się niebezpieczeństwo blokady kół napędowych i utraty sterowności pojazdu. Zadaniem układu ABS jest przeciwdziałanie zjawisku blokowaniu się kół, a przez to zmniejszenie niebezpieczeństwa wpadnięcia pojazdu w poślizg. Z tego powodu często, aczkolwiek mylnie o systemie ABS mówimy jako o systemie antypoślizgowym. Zadanie sterowania jest krytyczne czasowo. Polega ono na automatycznym sterowaniu ciśnienia w układzie hamulcowym w taki sposób, aby nie dopuścić do wystąpienia zjawiska blokady. Ze względu na różne warunki trakcyjne układ ABS musi oddziaływać niezależnie na każde z kół pojazdu. Zwykle spotykane jest rozwiązanie, w którym dla każdego koła pojazdu instalowany jest niezależny układ ABS.
Współczynnik tarcia \( \mu \) koła pojazdu o podłoże w głównym stopniu jest funkcją poślizgu koła \( \lambda \) wyznaczanej z zależności:
| \( \lambda =\frac{v_p-v_k}{v_p}\quad ;\quad v_p\neq0 \) | (172) |
|---|
gdzie: \( v_p \) - prędkość chwilowa pojazdu,
\( v_k \) - prędkość obwodowa koła pojazdu.
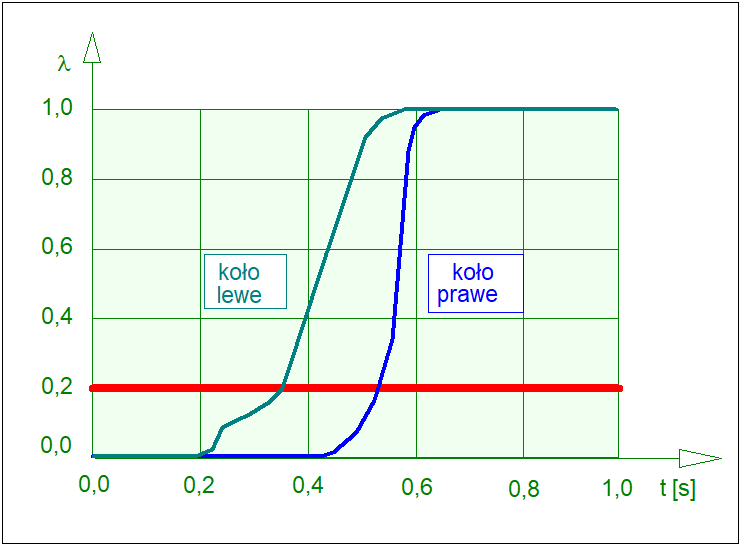
Jeśli dla \( v_p>0 \) współczynnik \( \lambda \) jest równy zeru to oznacza, że poślizg nie występuje, a więc prędkość pojazdu jest równa prędkości obwodowej kół. Przypadek taki oczywiście ma znaczenie wyłącznie teoretyczne. Jeśli współczynnik \( \lambda \) jest równy jeden, to oznacza, że koło jest zablokowane, a pojazd porusza się. Przypadek ten niestety nie należy do przypadków wyjątkowych. W stanie pełnego zablokowania kół pojazd traci sterowność, co może doprowadzić do przykrych konsekwencji. W wyniku długotrwałych badań doświadczalnych wyznaczono optymalną wartość współczynnika \( \lambda_{opt}=0,2 \) zapewniającą najkrótszą drogę hamowania pojazdu, bez utraty jego sterowności. Zadanie sterowania układu ABS sformułować można zatem następująco:
Zadaniem układu ABS jest utrzymywanie w czasie hamowania wartości poślizgu kół pojazdu na poziomie optymalnym (\( \lambda_{opt}=0,2 \)).
Wiele rozwiązań systemów ABS bazuje na wyznaczeniu wartości ciśnienia sterującego układem hamulcowym z odpowiednich dwuwymiarowych tabel, w których przechowywano zdyskretyzowane wartości ciśnienia sterowania w zależności od przyśpieszenia kątowego i poślizgu \( \lambda \) kół pojazdu. Efektem ubocznym tego rozwiązania były skokowe zmiany ciśnienia sterującego w układzie hamulcowym ze względu na naturalne ograniczenia w wymiarach stosowanych tablic. Zastosowanie logiki rozmytej pozwoliło na uzyskanie ciągłości sygnału sterującego bez konieczności zwiększania objętości tablic. Ogólny schemat zrealizowanego sprzętowo układu sterowania ABS przedstawiono na Rys. 48. Układ posiada pięć wielkości wejściowych (prędkość pojazdu \( v_p \), przyśpieszenie pojazdu \( dv_p/dt \), prędkość kół pojazdu \( v_k \), przyśpieszenie kół pojazdu \( dv_k/dt \) oraz współczynnik poślizgu kół pojazdu \( \lambda \).
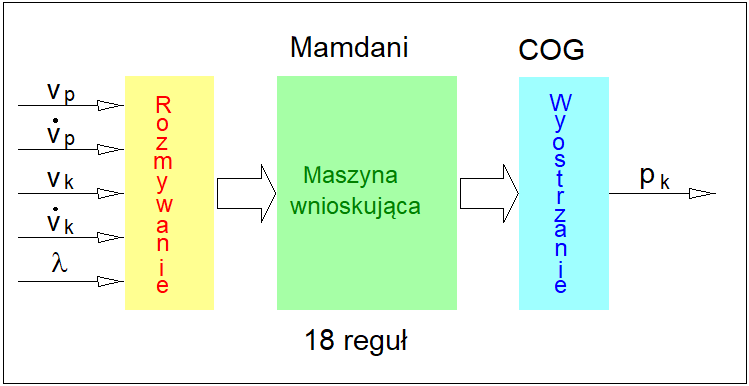
Wyjściem układu jest ciśnienie sterujące układu hamulcowego pk. Postać funkcji przynależności zarówno wejść jak i wyjść chroniona jest tajemnicą firmową. W układzie zastosowano maszynę wnioskującą opartą na wnioskowaniu z zestawu 18 reguł zgodnie ze schematem Mamdaniego.
Na podstawie tak małej liczby reguł w stosunku do liczby wejść należy się domyślać, że zastosowano niezupełna bazę reguł. Wyostrzanie wniosku rozmytego dokonywane jest metodą środka ciężkości obszaru (COG). Maksymalny okres impulsowania tego typu regulatora nie może przekraczać wartości 5 ms. Z tego powodu algorytm sterowania został realizowany sprzętowo.
Dzięki zastosowaniu logiki rozmytej poprawiono warunki eksploatacji układu hamulcowego i wyeliminowano nieprzyjemne dla użytkownika pojazdu pulsowanie pedału hamulca w czasie hamowania.