Podręcznik
Wersja podręcznika: 1.0
Data publikacji: 01.01.2022 r.
Wykłady
W1…WN, odpowiadające w sumie ok. 10-12 godz. standardowego wykładu
3. Techniki restrykcyjne i relaksacyjne
3.2. Restrykcja - dekompozycja Bendersa
W tym rozdziale pokażemy możliwości wykorzystania dekomponowalnej struktury zadania lokalizacji, stosując zamiast relaksacji techniki restrykcji. Restrykcja to technika polegająca na dodatkowym ograniczaniu zbioru dopuszczalnego problemu optymalizacji. W omawianej we wcześniejszych rozdziałach metodzie podziału i oszacowań restrykcja była wykorzystywana do wydzielania części obszaru dopuszczalnego poprzez narzucenie ograniczeń typu nierównościowego na zmienne. W metodzie opracowanej przez Bendersa w 1962r. restrykcja polega na narzuceniu konkretnych wartości wybranym zmiennym całkowitoliczbowym, podczas gdy pozostałe zmienne są optymalizowane. Metoda Bendersa ma zatem zastosowanie do rozwiązywania tylko pewnych klas problemów optymalizacji, dla których w możliwy jest rozdział zmiennych, w szczególności prowadzący do wyodrębnienia zadania programowania liniowego oraz zadania programowania dyskretnego, które jest łatwiejsze do rozwiązywania od pierwotnego problemu dyskretno-ciągłego.
Przypomnijmy, ze w zadaniu lokalizacji rozważanym w poprzednim podrozdziale poświęconym relaksacji Lagrange'a problem pierwotny polega na określeniu, w których miastach otworzyć magazyny (zmienna binarna  ) oraz w jakich proporcjach zaspokoić zapotrzebowanie klientów w miastach
) oraz w jakich proporcjach zaspokoić zapotrzebowanie klientów w miastach  zaopatrywanych przez magazyny
zaopatrywanych przez magazyny  (zmienna ciągła z zakresu
(zmienna ciągła z zakresu  ). Dla uproszczenia, analizujemy łatwieszą wersję problemu, w którym pomijamy ograniczone pojemności magazynów.
). Dla uproszczenia, analizujemy łatwieszą wersję problemu, w którym pomijamy ograniczone pojemności magazynów.
Sformułowanie matematyczne problemu pierwotnego P:

p.o.:
(1) 
(2) 
(3) 
Zdefiniujmy teraz problem operujący tylko na zmiennych ciągłych , w którym jest traktowane jako parametr - zostało poddane restrykcji. Przyjmując, że wartości wektora są ustalone, restrykcja ") zadania (P) jest podproblemem sparametryzowanym przez y. W takiej sytuacji jest zadaniem liniowym względem zmiennej x o następującej postaci:
zadania (P) jest podproblemem sparametryzowanym przez y. W takiej sytuacji jest zadaniem liniowym względem zmiennej x o następującej postaci:
= \min \sum_{ij} c_{ij}x_{ij}")
p.o.:
(4) 
(5) 
(6) 
W powyższym sformułowaniu oznaczyliśmy też zmienne dualne do ograniczeń (4) i (5), które będą wykorzystane w dalszej analizie metody Bendersa. Przypomnijmy, że sformułowanie dualne można rozważać tylko dla problemów ze zmiennymi ciągłymi - a taki właśnie jest problem . Zauważmy przy okazji, że problem może być zdekomponowany na niezależnych podproblemów optymalizacji, podobnie niezależnie można określać odpowiednie zmienne dualne . Podproblem ") :
:
= \min \sum_{i} c_{ij}x_{ij}")
p.o.:
(7) 
(8) 
(9) 
W metodzie dekompozycji Bendersa kolejnym elementem schematu postępowania jest sformułowanie dualne zadania określane jako problem D1. Skorzystamy z możliwości dekompozycji zadania
na podproblemy i dla ułatwienia rozważań sformułujemy podproblem ") :
:
= \max \lambda_j+\sum_{i} y_iv_{ij}")
p.o.:
(10) 
(11)  .
.
Zmienna dualna  w zadaniu jest nieograniczonego znaku, przy czym musi być zawsze niezerowa, tj. musi być zmienną bazową (każde miasto musi być zaopatrzone). Ze względu na maksymalizację, oraz ograniczenie (10) będzie przybierać najniższą z wartości
w zadaniu jest nieograniczonego znaku, przy czym musi być zawsze niezerowa, tj. musi być zmienną bazową (każde miasto musi być zaopatrzone). Ze względu na maksymalizację, oraz ograniczenie (10) będzie przybierać najniższą z wartości  , dla których
, dla których  . Natomiast w pozostałych przypadkach, z tego względu że w bazie nie może być dodatkowych zmiennych
. Natomiast w pozostałych przypadkach, z tego względu że w bazie nie może być dodatkowych zmiennych  (lub zmiennych dopełniających) szczególna postać tego zadania pozwala wyznaczyć rozwiązania zmiennych dualnych jako:
(lub zmiennych dopełniających) szczególna postać tego zadania pozwala wyznaczyć rozwiązania zmiennych dualnych jako:
^+, (c_{2j}-c_{kj})^+,\ldots, (c_{nj}-c_{kj})^+)") .
.
Stąd:
![\hat{r}^j = \max_{k\in \mathrm{cities}} [c_{kj}+ \sum_{i \in \mathrm{cities}}y_i(c_{ij}-c_{kj})^+]](https://esezam.okno.pw.edu.pl/filter/tex/pix.php/26eed7d449f4b246f617be06ddfaf8ed.gif "\hat{r}^j = \max_{k\in \mathrm{cities}} [c_{kj}+ \sum_{i \in \mathrm{cities}}y_i(c_{ij}-c_{kj})^+]") .
.
Najważniejszą cechą zadania dualnego w metodzie Bendersa jest to, że jego zbiór rozwiązań dopuszczalnych nie zależy od wyboru  . Dzieje się tak, ponieważ ustalony jest pomijany w funkcji celu zadania pierwotnego, a jak pamiętamy, w ograniczeniach zadania dualnego wykorzystywane są jedynie współczynniki funkcji celu zadania prymalnego. Niezależność zbioru dopuszczalnego
. Dzieje się tak, ponieważ ustalony jest pomijany w funkcji celu zadania pierwotnego, a jak pamiętamy, w ograniczeniach zadania dualnego wykorzystywane są jedynie współczynniki funkcji celu zadania prymalnego. Niezależność zbioru dopuszczalnego ") od wektora pozwala na rozważanie wyłącznie punktów wierzchołkowych tego zbioru, gdyż to w jednym z nich znajduje się optimum, którego wartość zależy od . To pozwala przekształcić problem P do równoważnego zadania D2. W rozważanym tu problemie lokalizacji jest on następującej postaci. Problem
od wektora pozwala na rozważanie wyłącznie punktów wierzchołkowych tego zbioru, gdyż to w jednym z nich znajduje się optimum, którego wartość zależy od . To pozwala przekształcić problem P do równoważnego zadania D2. W rozważanym tu problemie lokalizacji jest on następującej postaci. Problem  :
:

p.o.:
(12) ^+,\;\;\; \forall k,j\in \mathrm{cities}")
(13) 
(13)  .
.
Bezpośrednie rozwiązywanie zadania D2 jest na ogół niepraktyczne, gdyż wymaga wyznaczenia wszystkich punktów wierzchołkowych zbioru dualnego, co może być szczególnie kłopotliwe w przypadku dużej liczby wierzchołków. Dlatego Benders opracował iteracyjną procedurę, która pozwala na wyznaczenie optymalnego wierzchołka zbioru dualnego zazwyczaj w niewielkiej liczbie iteracji.
Formalna konstrukcja algorytmu Bendersa:
- Krok 0. Wyznacz wartość wektora zmiennych dualnych
 jako dowolne rozwiązanie dopuszczalne problemu dualnego - uwaga, nie musi to być punkt wierzchołkowy zbioru dopuszczalnego. Jeżeli rozwiązanie dopuszczalne nie istnieje, to STOP. W p. p. przyjmij
jako dowolne rozwiązanie dopuszczalne problemu dualnego - uwaga, nie musi to być punkt wierzchołkowy zbioru dopuszczalnego. Jeżeli rozwiązanie dopuszczalne nie istnieje, to STOP. W p. p. przyjmij  i idź do kroku 1.
i idź do kroku 1. - Krok 1. Rozwiąż zadanie zrelaksowane
 , tzn. zadanie D2, w którym występuje jedynie
, tzn. zadanie D2, w którym występuje jedynie  ograniczeń. W wyniku rozwiązaniu zrelaksowanego zadania uzyskujemy optymalną wartość wektora
ograniczeń. W wyniku rozwiązaniu zrelaksowanego zadania uzyskujemy optymalną wartość wektora  , i wartość funkcji celu będącą wartością oszacowania górnego
, i wartość funkcji celu będącą wartością oszacowania górnego  .
. - Krok 2. Rozwiąż zadanie restrykcyjne podstawiając . W wyniku rozwiązania restrykcji zadania uzyskujemy optymalną wartość wektora zmiennych dualnych
 . Na jego podstawie oraz wartości
. Na jego podstawie oraz wartości  można obliczyć oszacowanie dolne
można obliczyć oszacowanie dolne  w -tej iteracji.
w -tej iteracji. - Krok 3. Jeżeli
 to jest rozwiązaniem optymalnym problemu (P), idź do kroku 4 w celu wyznaczeniu optymalnej wartości x. W p.p. podstaw
to jest rozwiązaniem optymalnym problemu (P), idź do kroku 4 w celu wyznaczeniu optymalnej wartości x. W p.p. podstaw  i idź do kroku 1.
i idź do kroku 1. - Krok 4. Rozwiąż problem przyjmując . STOP.
 iteracjach, gdzie to liczba punktów wierzchołkowych zadania dualnego Bendersa.
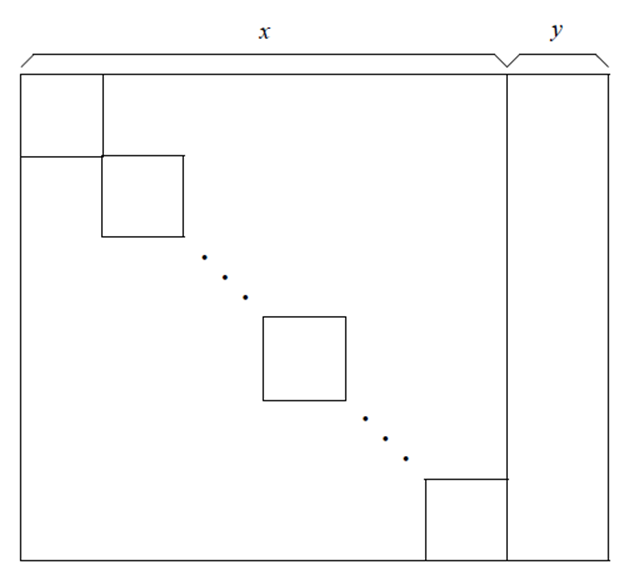
iteracjach, gdzie to liczba punktów wierzchołkowych zadania dualnego Bendersa.Uwaga. Dekompozycja Bendersa może być szczególnie efektywna w przypadku, gdy struktura macierzy ograniczeń jest blokowo-diagonalna z wstęgą pionową, jak pokazano na poniższym rysunku.
Innym przykładem możliwości zastosowania metody dekompozycji Bendersa jest sytuacja, gdy funkcje powiązane ze zmienną
mają szczególną strukturę, np. wynikającą z przepływu w sieciach.