Podręcznik
2. Uczenie maszynowe
2.2. Algorytmy gradientowe
Algorytmy gradientowe są istotną klasą algorytmów optymalizacji wykorzystywaną szeroko w uczeniu sieci neuronowych. Celem optymalizacji jest dobór parametrów modelu, tak, aby zminimalizować funkcję kosztu. Funkcja kosztu opisuje błąd popełniany przez model dla przykładów ze zbioru uczącego i chcemy ją zmniejszać. Konkretne wzory na funkcje kosztu w różnych zastosowaniach omówimy w rozdziale 3.4.
W podstawowej wersji algorytm minimalizacji metodą spadku działa następująco. Wariant ten nazywamy metodą gradientu prostego:
-
ustaw wartość początkową \( w \) na \( w_0 \)
-
dopóki nie warunek stopu \[ w \gets w - \alpha \frac{\partial J}{\partial w} \]
-
idź do 2.
Poprzez \( w \) oznaczamy parametry naszego modelu (np. wagi sieci neuronowej). Może to być pojedyncza liczba, ale najczęściej jest to wektor lub macierz wielu liczb. Algorytm rozpoczynamy od przypisania wartości początkowej \( w_0 \). Następnie wyznaczamy gradient funkcji kosztu \( J \) po parametrach \( \frac{\partial J}{\partial w} \) i modyfikujemy wartości \( w \) według wzoru \( w \gets w - \alpha \frac{\partial J}{\partial w} \). \( \alpha \) nazywamy współczynnikiem uczenia. Jest to niewielka liczba dodatnia określająca wielkość kroków wykonywanych przez algorytm. Zapętlamy ten krok aż do osiągnięcia warunku stopu.
Warunkiem stopu może być:
-
Wykonanie określonej liczby iteracji lub przekroczenie czasu obliczeń. Warunek ten odnosi się do wykorzystania zasobów obliczeniowych.
-
Osiągnięcie wystarczająco małej wartości funkcji kosztu \( J \). Warunek ten odnosi się do uzyskania zakładanej jakości modelu. Zamiast funkcji kosztu można wykorzystać inną metrykę. Dla uniknięcia zjawiska przeuczenia, zalecane jest wykonywanie sprawdzenia na zbiorze walidacyjnym.
-
Brak poprawy funkcji kosztu w kolejnych iteracjach. Warunek ten odnosi się do braku perspektyw na dalszą poprawę rozwiązania. Dla uniknięcia zjawiska przeuczenia, zalecane jest wykonywanie sprawdzenia na zbiorze walidacyjnym.
-
Osiągnięcie odpowiednio małej wartości modułu gradientu \( \frac{\partial J}{\partial w} \). Małe wartości modułu gradientu oznaczają małe kroki algorytmu. Warunek ten odnosi się do braku perspektyw na dalszą poprawę rozwiązania.
Rozważmy zestaw przykładów dla wypukłej funkcji kosztu i jednowymiarowego \( w \) przedstawiony na rysunku 2. Funkcja ta ma jedno globalne minimum dla wartości \( w^* = 5 \) i \( J(5) = 1 \).
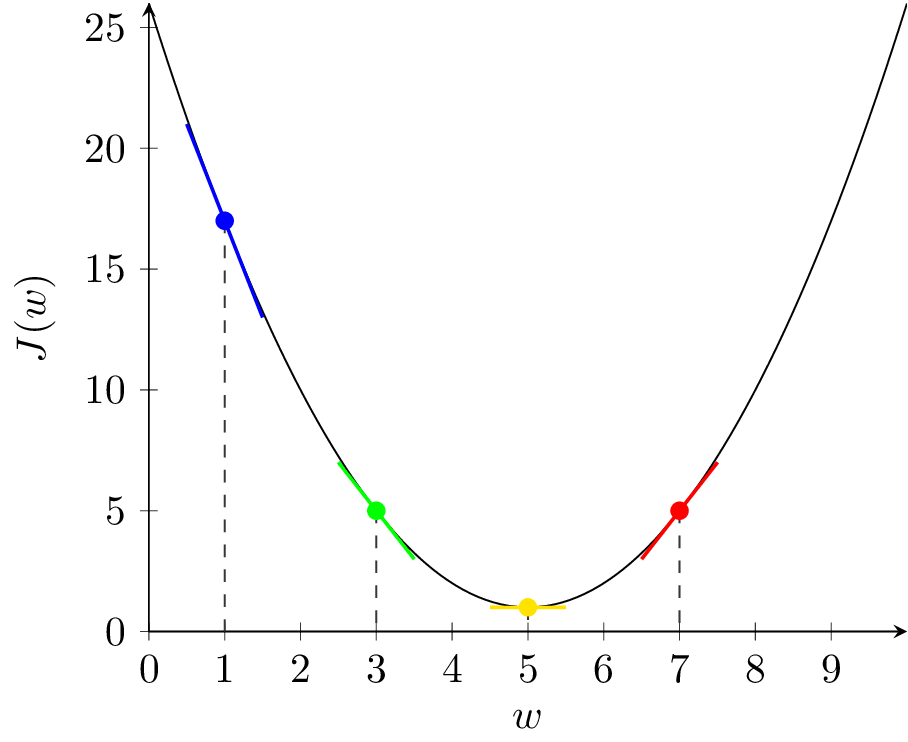
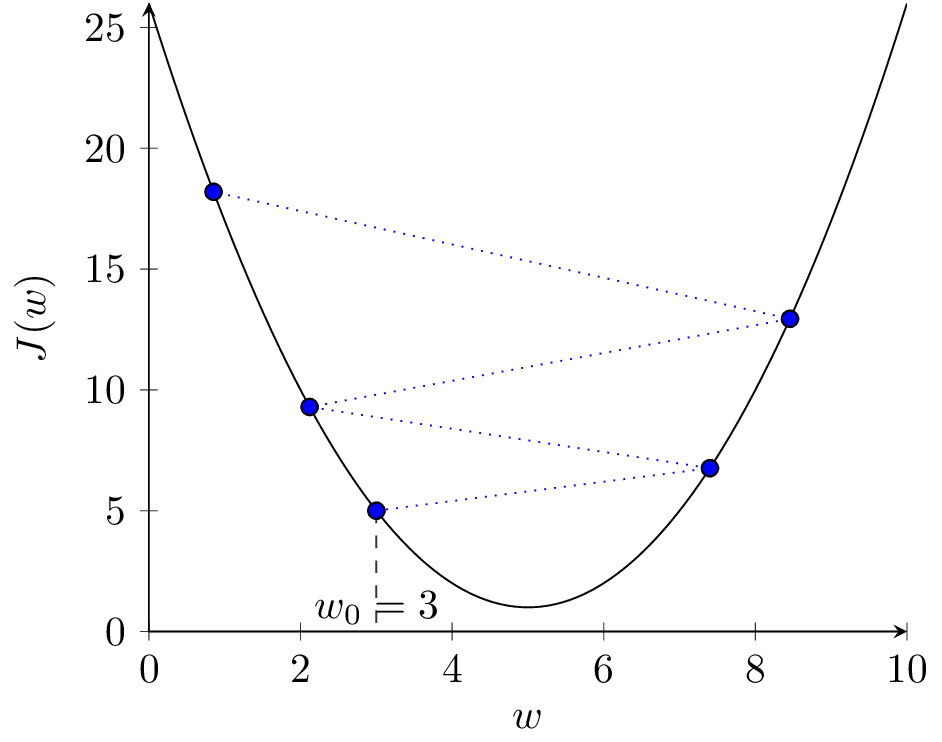
Pochodna \( \frac{\partial J}{\partial w} \) jest współczynnikiem kierunkowym prostej stycznej do wykresu funkcji \( J(w) \). Na rysunku 2(a), w punkcie niebieskim pochodna \( \frac{\partial J}{\partial w} \) ma wartość ujemną. Zatem \( - \alpha \frac{\partial J}{\partial w} \) ma wartość dodatnią i kolejnym kroku zwiększymy wartość \( w \) (przesuniemy się w prawo). Jest to działanie prawidłowe, ponieważ znajdujemy się w punkcie \( w = 1 \) i zwiększanie przybliża nas do optymalnej wartości \( w^* = 5 \). Analogicznie wygląda sytuacja dla punktu zielonego, tylko nachylenie stycznej (pochodna) jest mniejsze, więc algorytm wykona mniejszy krok (mniej zwiększy wartość \( w \)). Odwrotnie, dla punktu czerwonego, pochodna jest dodatnia, więc \( - \alpha \frac{\partial J}{\partial w} \) ma wartość ujemną i w kolejnym kroku zmniejszymy wartość \( w \). Również jest to działanie prawidłowe. Punkt żółty znajduje się w optimum i pochodna wynosi zero. Jeśli trafimy w ten punkt, algorytm się zatrzyma.
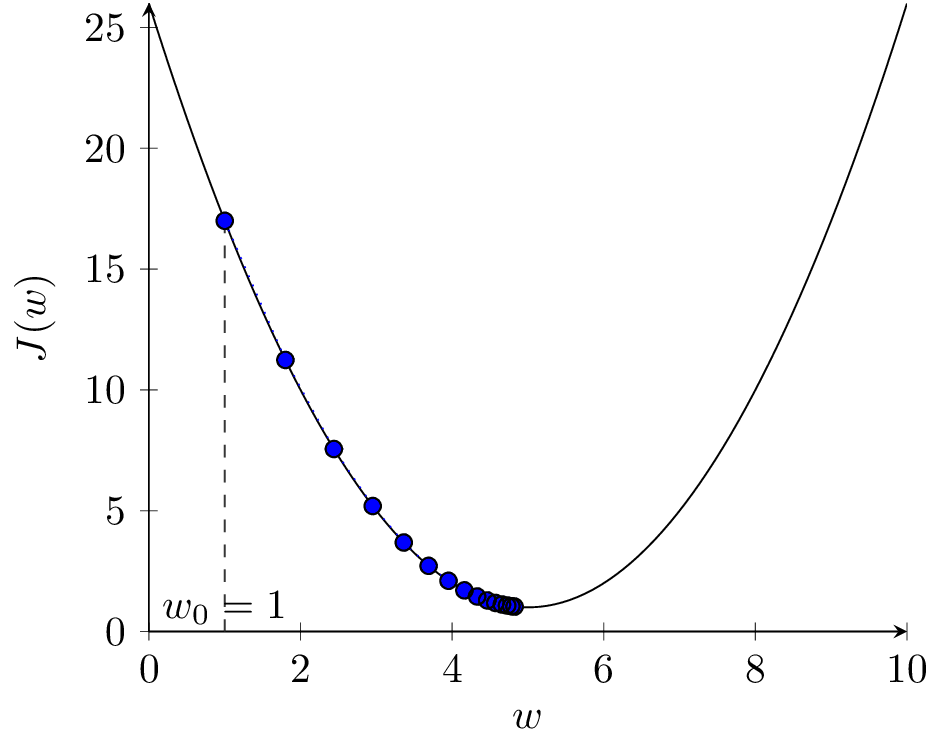
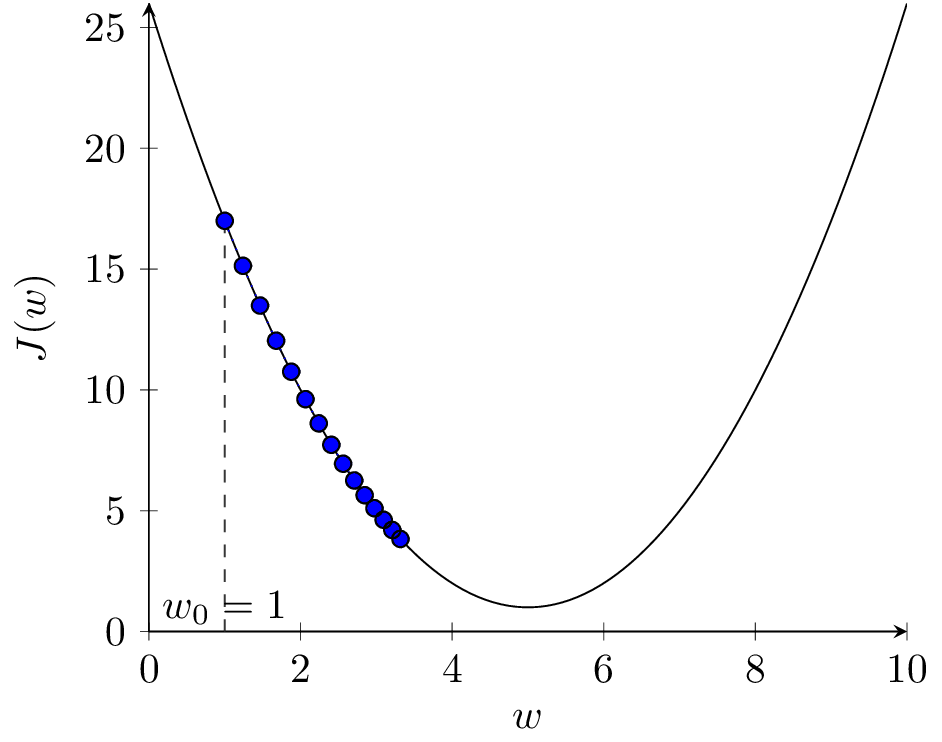
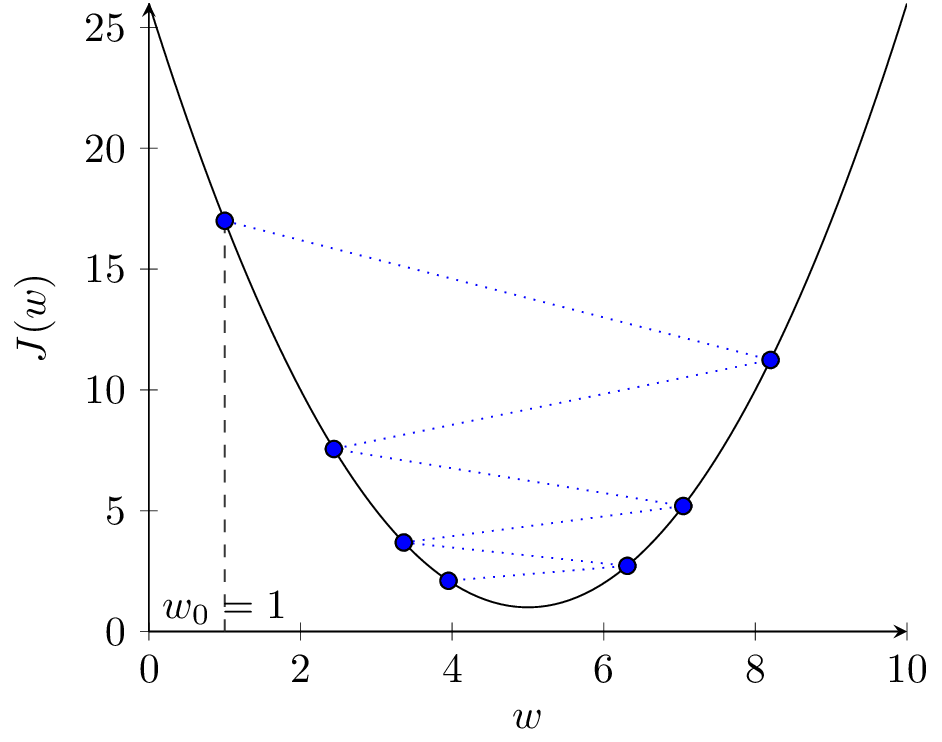
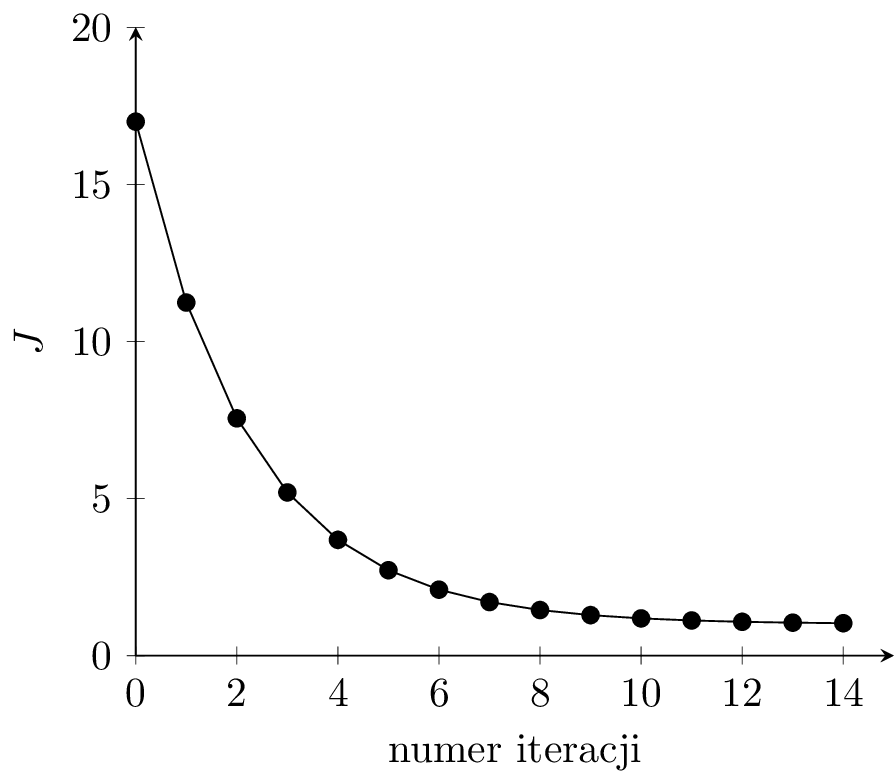
Na rysunku 2(b) przedstawione zostały kolejne kroki algorytmu dla \( \alpha = 0.1 \). Widzimy, że po 15 iteracjach algorytm znajduje się bardzo blisko optimum. Dla mniejszej wartości \( \alpha = 0.03 \) (rys. 2(c)) algorytm porusza się dobrym kierunku, ale wolniej. Dla większej wartości \( \alpha = 0.9 \) (rys. 2(d)) algorytm zaczyna przeskakiwać z jednej strony minimum na drugą, funkcja kosztu się zmniejsza, ale algorytm staje się mniej stabilny. Dalsze zwiększanie \( \alpha \) do wartości 1.1 prowadzi do sytuacji jak na rysunku 2(e). Kroki algorytmu są za duże, funkcja kosztu zwiększa wartość w kolejnych krokach, algorytm jest rozbieżny.
Wartość współczynnika uczenia \( \alpha \) jest jednym z hiper-parametrów w uczeniu sieci neuronowych i ma istotne znaczenie dla działania algorytmu.
Na rysunku 2(f) widzimy wykres wartości funkcji kosztu w kolejnych iteracjach dla \( \alpha = 0.1 \). Dla prawidłowo przebiegającego procesu uczenia funkcja kosztu powinna spadać w kolejnych iteracjach uczenia dla zbioru uczącego. Jeśli model zacznie się przeuczać, to koszt dla zbioru walidacyjnego w pewnym momencie może zacząć rosnąć. Jest to znak, że powinniśmy przerwać uczenie.