Podręcznik
Wstęp do logiki rozmytej
3. Modelowanie rozmyte
3.2. Model analityczny
Podejście klasyczne polega na wyznaczeniu modelu matematycznego obiektu i doborze układu regulacji z uwzględnieniem zdefiniowanych kryteriów jakości.
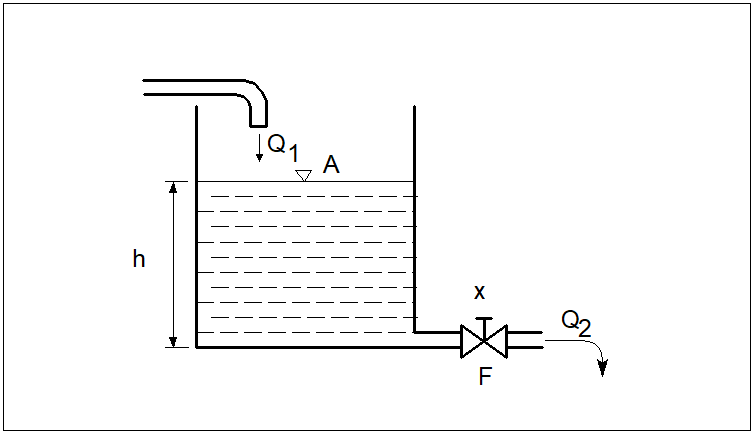
Oznaczenia: \( A \) - powierzchnia zbiornika, \( h \) - wysokość słupa cieczy, \( Q_1 \) - strumień objętościowy cieczy dopływającej, \( Q_2 \) - strumień objętościowy cieczy wypływającej, \( x \) - stopień otwarcia zaworu dławiącego wypływ, \( F \) - powierzchnia przepływowa zaworu.
Załóżmy, że wielkością wejściową jest stopień otwarcia \( x \) zaworu dławiącego wypływ ze zbiornika, zaś wielkością wyjściową jest wysokość słupa cieczy \( h \). W podejściu klasycznym, przy zastosowaniu opisu liniowego, poszukiwana jest transmitancja operatorowej obiektu \( G(s) \) w postaci:
| \( G(s)= \frac{H(s)}{X(s)} \) | (87) |
|---|
gdzie:
\( H(s) \) - transformata Laplace'a sygnału wyjściowego
\( X(s) \) - transformata Laplace'a sygnału wejściowego
Załóżmy dalej, dla uproszczenia, że \( Q_1 = const \).
Zmiana wysokości słupa cieczy \( \delta h \) wynika z różnicy strumieni objętościowych: cieczy wpływającej \( Q_1 \) i wypływającej \( Q_2 \):
| \( A\Delta h =\Delta t (Q_1 - Q_2) \) | (88) |
|---|
Strumień objętościowy \( Q_2 \) można wyrazić w postaci:
| \( Q_2 =\alpha \cdot x \cdot \sqrt {2gh} \) | (89) |
|---|
gdzie:
\( \alpha \)- współczynnik przepływu
\( g \) - przyśpieszenie ziemskie
Po linearyzacji, nieliniowej względem \( h \), zależności (89) w otoczeniu punktu \( h_o \), \( x_o \) otrzymujemy:
| \( \Delta Q_2 =\left\vert{\frac{\partial Q_2}{\partial x}}\right\vert _{x=x_o}\Delta x+\left\vert{\frac{\partial Q_2}{\partial h}}\right\vert _{h=h_o}\Delta h \) | (90) |
|---|
a zatem:
| \( \Delta Q_2 =\alpha \cdot \sqrt {2gh_{0}}\cdot \Delta x +x_{0}\cdot\alpha \cdot\sqrt {\frac{g}{2h_0}}\cdot\Delta h \) | (91) |
|---|
podstawiając:
| \( k_1 =\alpha \cdot \sqrt {2gh_{0}}\;\;\;\; ; \quad k_2=x_{0}\cdot\alpha \cdot\sqrt {\frac{g}{2h_0}} \) | (92) |
|---|
otrzymujemy zlinearyzowaną postać na \( \Delta Q_2 \):
| \( \Delta Q_2 =k_{1}\cdot \Delta x +k_{2}\cdot\Delta h \) | (93) |
|---|
Przedstawiając równanie (88) w formie równania różnicowego otrzymujemy:
| \( A\Delta(\Delta h) =\Delta t (\Delta Q_1 - \Delta Q_2) \) | (94) |
|---|
a ponieważ \( Q_1 = const \) oraz po uwzględnieniu (93) otrzymujemy:
| \( A\Delta(\Delta h) =-\Delta t\cdot k_{1}\cdot\Delta x -\Delta t\cdot k_{2}\cdot\Delta h \) | (95) |
|---|
Stąd w granicy dla \( t\rightarrow 0 \)
| \( A\Delta h =- k_{1}\cdot\Delta x - k_{2}\cdot\Delta h \) | (96) |
|---|
Oznaczając: \( H(s) = L\left\{\Delta h\right\} \) oraz \( X(s) = L\left\{x\right\} \) otrzymujemy ostatecznie:
| \( G(s)= \frac{H(s)}{X(s)}=-\frac{k}{Ts+1} \) | (97) |
|---|
gdzie: \( T = A / k_2 \); \( k= k_1 / k_2 \)
Jak łatwo zauważyć transmitancja operatorowa (97) ma postać właściwą elementowi inercyjnemu rzędu pierwszego. Znak minus poprzedzający transmitancję należy interpretować w ten sposób, że wzrost stopnia otwarcia zaworu \( x \) na wypływie powoduje spadek, a nie wzrost wielkości wyjściowej jaką jest wysokość słupa cieczy \( h \).
Transmitancja (97) jest bardzo wygodna do prowadzenia analizy właściwości dynamicznych obiektu, doboru układu regulacji, badania stabilności, itp. Wartości współczynników \( k_1 \) i \( k_2 \) są jednak zależne od wyboru punktu pracy. Wartości te mogą być traktowane jako wartości stałe tylko w niewielkim otoczeniu punktu pracy \( (x_o , h_o ) \).
W praktyce uzyskanie modeli analitycznych obiektów sterowania nie jest proste. Wynika to głównie ze złożoności procesów zachodzących w rzeczywistych obiektach, niemożliwości zastosowania opisu liniowego, braku dostatecznej wiedzy co do wartości parametrów opisujących proces, konieczności przeprowadzenia kosztownej identyfikacji parametrów modelu, itp. W takich sytuacjach należy rozważyć opis jakościowy procesu możliwy do uzyskania na podstawie wiedzy heurystycznej, wiedzy uzyskanej z eksperymentu myślowego lub wiedzy eksperckiej.